RG2 User Manual – Version 1.44
Specifications is periodically reviewed and may change without notice Copyright © 2015 – 2016 by On Robot ApS. All rights reserved
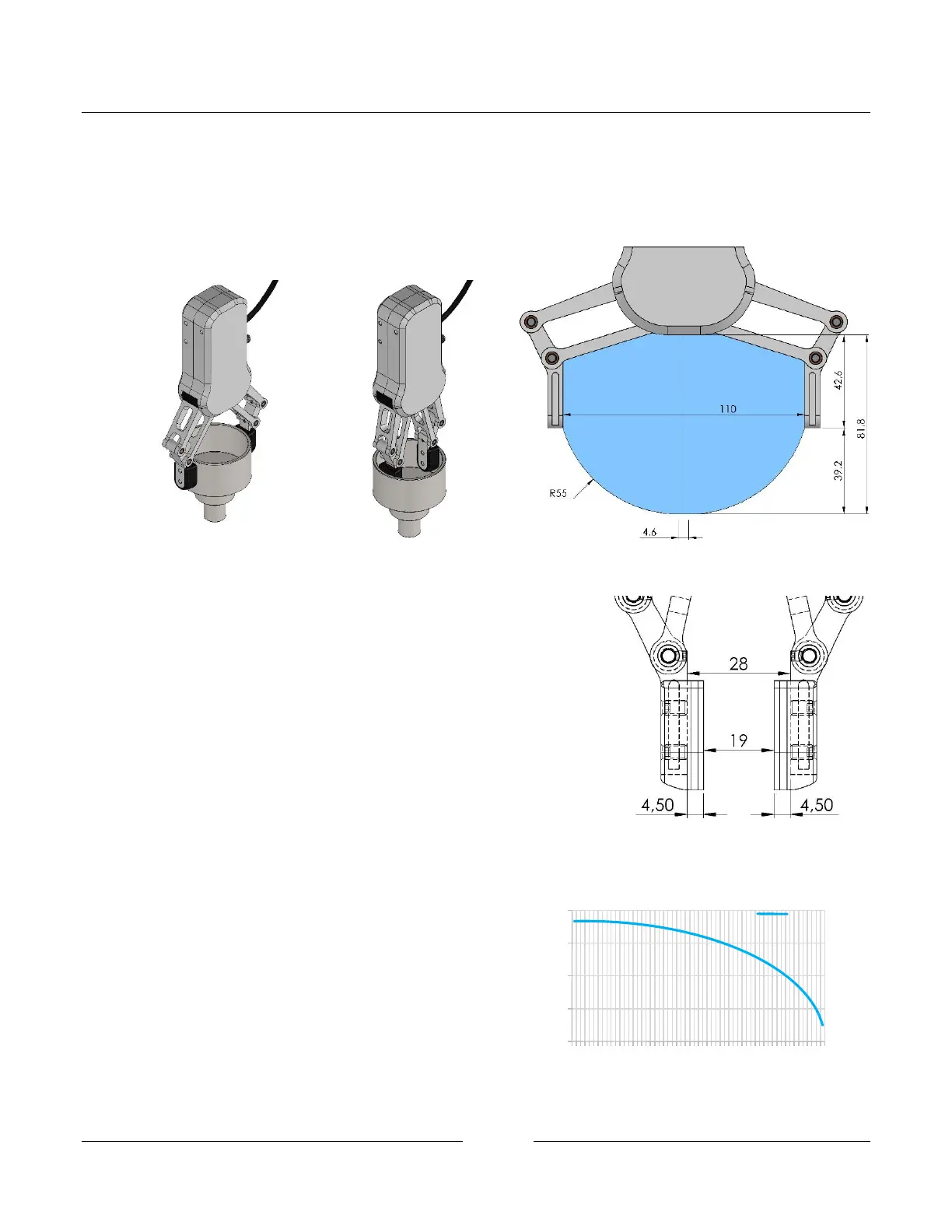
4.5 Gripper Work Range
The work range is measured between the aluminum fingers. The gripper can be used for both internal and
external grip, e.g. by rotating the fingers. Make sure that the offset is included before entering values into the
gripper settings.
4.5.1 Finger thickness
In this example, we want to grip an object of 20mm.
To clear the object before gripping we want to set the gripping width
to 28mm in the gripper settings on the robot. Because of the finger
thickness, the resulting actual gripper width will be 19mm, which is not
enough to clear the object. To calculate the needed setting, you need the
finger thickness, which is the offset from the inner aluminum finger to the
contact flange of the mounted finger, in this case 4,5mm.
2*finger thickness + clearing gap + object width = Actual gripping width
In this example: 2*4,5+8+20 = 37 type 37 into the gripper settings on the robot.
4.5.2 Gripping speed
Speed table illustrating the difference in speed
relative to the gripper finger position.