RG2 User Manual – Version 1.44
Specifications is periodically reviewed and may change without notice Copyright © 2015 – 2016 by On Robot ApS. All rights reserved
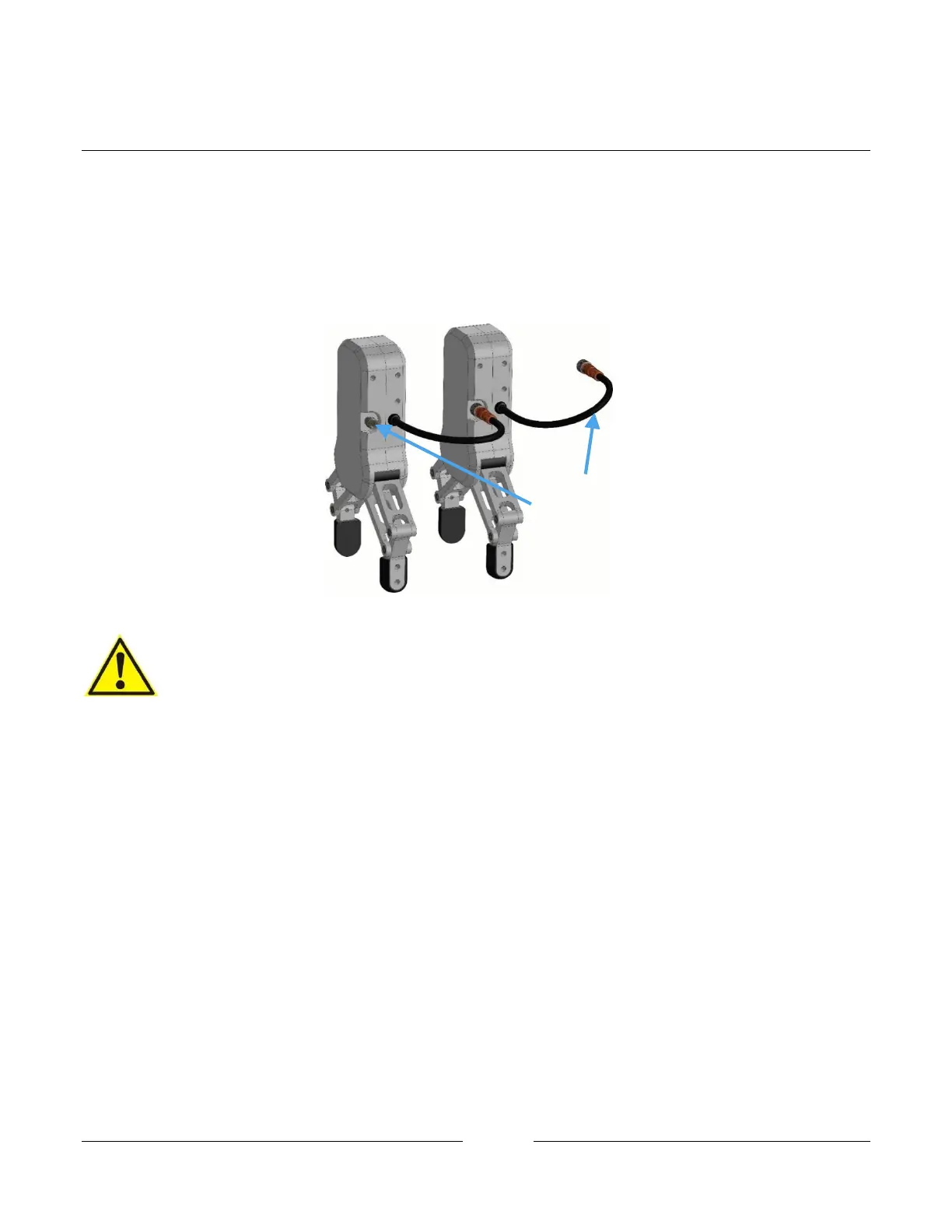
7.5 Two Grippers
When one gripper is connected to another via the gripper output connector. The first gripper in the chain (from
the robot) becomes master and the second slave. This makes it possible to use both grippers individually using
only two digital outputs from the robot.
For using two grippers open the robot program RG2_Dual.urp
CAUTION:
1. When using two grippers, both cannot be turned on from the I/O screen as it is with one
gripper. When trying to turn on two grippers at the same time the robot will show the
warning I/O over current.
This is avoided by programming the grippers first and then they can be used from the I/O
screen.
2. Do NOT connect more than two grippers in a chain. Connecting more than two can cause
damage to the equipment.
The master gripper can be controlled with the scrips open_master.script/close_master.script, the functions
open_master()/close_master() or by toggling tool_out[0]. The slave gripper can be controlled with the scrips
open_slave.script/close_ slave.script, the functions open_ slave ()/close_ slave () or by toggling tool_out[1].
The master is using the parameters defined in Close, Open, Force_, while the slave is using those stored in Close2,
Open2 and Force2.