C-863.12 Mercury Controller MS249E Version: 1.2.1 241
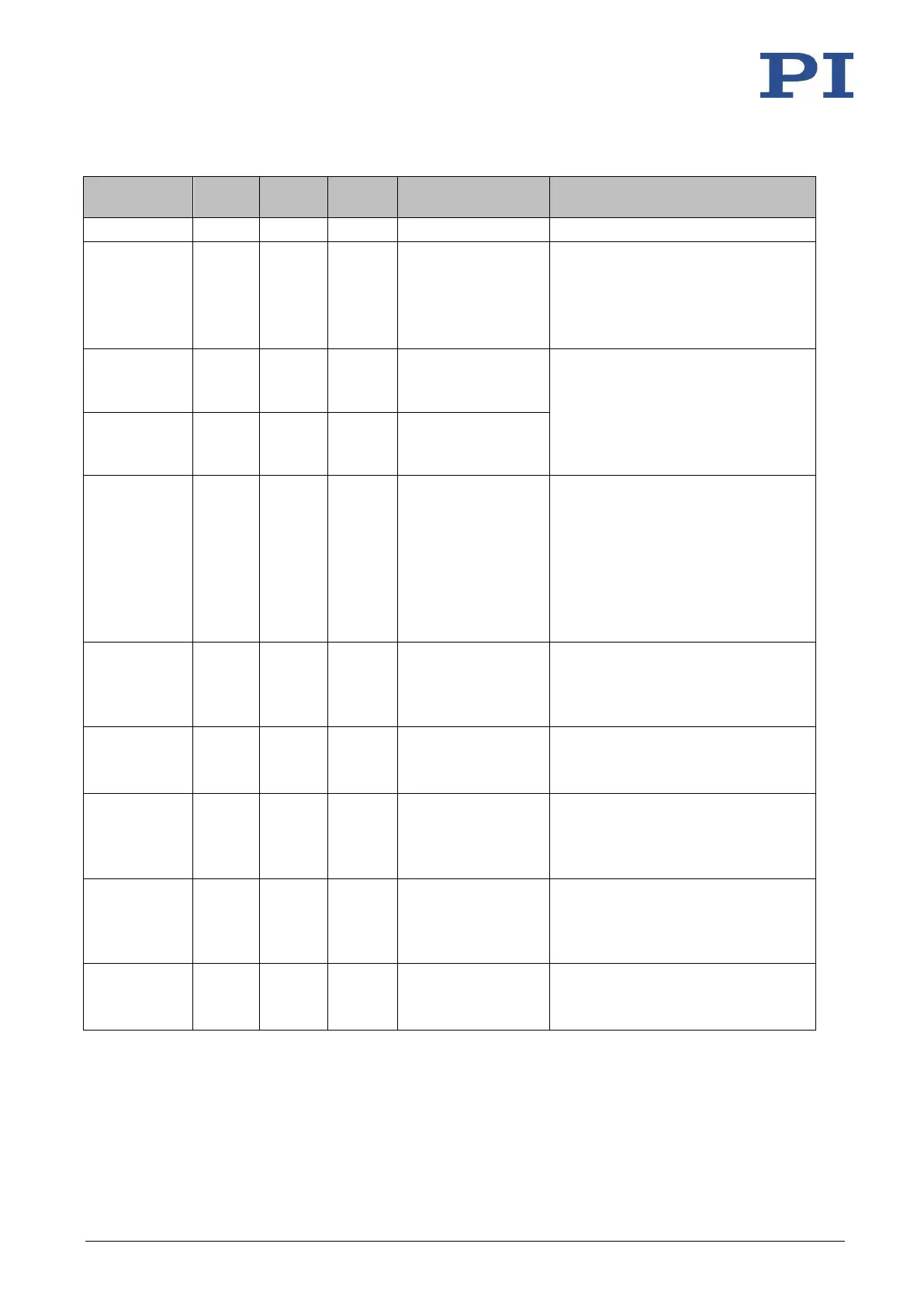
Dynamics Profile" (p. 18).
Closed-Loop
Deceleration (Phys.
Unit/s
2
)
Deceleration in closed-loop
operation
Limited by parameter 0x4B.
For details, see "Generation of
Dynamics Profile" (p. 18).
Numerator Of The
Counts-Per-Physical-
Unit Factor
Numerator and denominator of the
factor for counts per physical length
unit
For details, see "Physical Units" (p.
15).
Denominator Of The
Counts-Per-Physical-
Unit Factor
Is this a rotation stage?
0 = Not a rotation stage
1 = Rotation stage
No evaluation by the C-863.12, but
only by the PC software:
PIMikroMove determines which
motion is permissible on the basis of
this value.
Does the positioner have a
reference switch?
For details, see "Reference Switch
Detection" (p. 24).
Maximum Travel In
Positive Direction
(Phys. Unit)
Soft limit in positive direction
See examples in "Travel Range and
Soft Limits" (p. 26).
Value At Reference
Position (Phys. Unit)
Position value at the reference
switch
See examples in "Travel Range and
Soft Limits" (p. 26).
Distance From
Negative Limit To
Reference Position
(Phys. Unit)
Distance between the reference
switch and the negative limit switch
See examples in "Travel Range and
Soft Limits" (p. 26).
Signal logic of the limit switches
For details, see "Limit Switch
Detection" (p. 24).