C-863.12 Mercury Controller MS249E Version: 1.2.1 19
When switching on the servo mode
with the SVO command or when
stopping the axis motion with the
#24, STP or HLT commands, the
target position is set to the current
position.
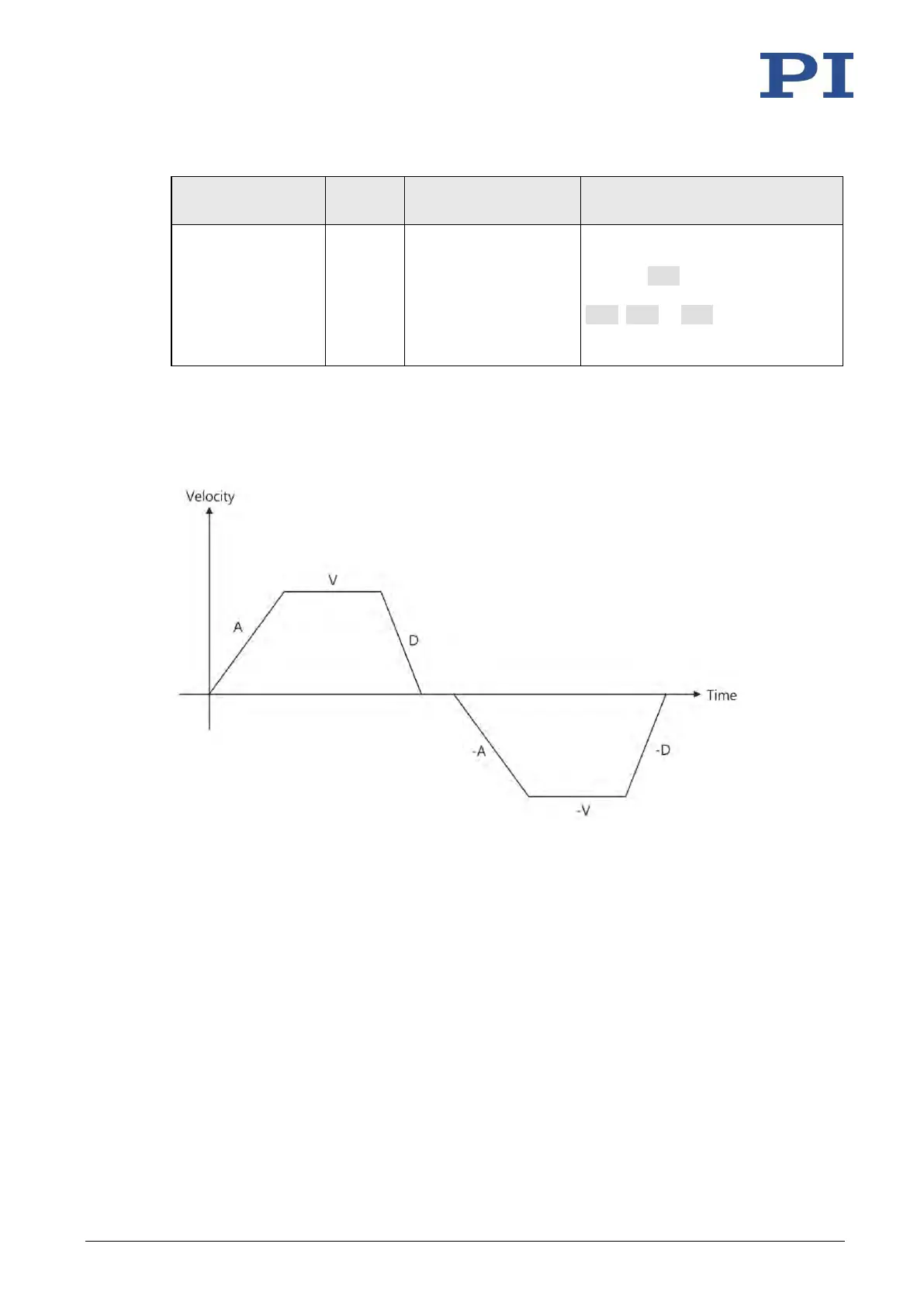
The profile generator of the C-863.12 only supports trapezoidal velocity profiles: The axis
accelerates linearly (based on the acceleration value specified) until it reaches the specified
velocity. It continues to move with this velocity until it decelerates linearly (based on the
deceleration value specified) and stops at the specified target position.
Figure 4: Basic trapezoidal velocity profile; A = acceleration, D = deceleration, V = velocity
If the deceleration has to begin before the axis reaches the specified velocity, the profile will
not have a constant velocity portion and the trapezoid becomes a triangle.