20 Version: 1.2.1 MS249E C-863.12 Mercury Controller
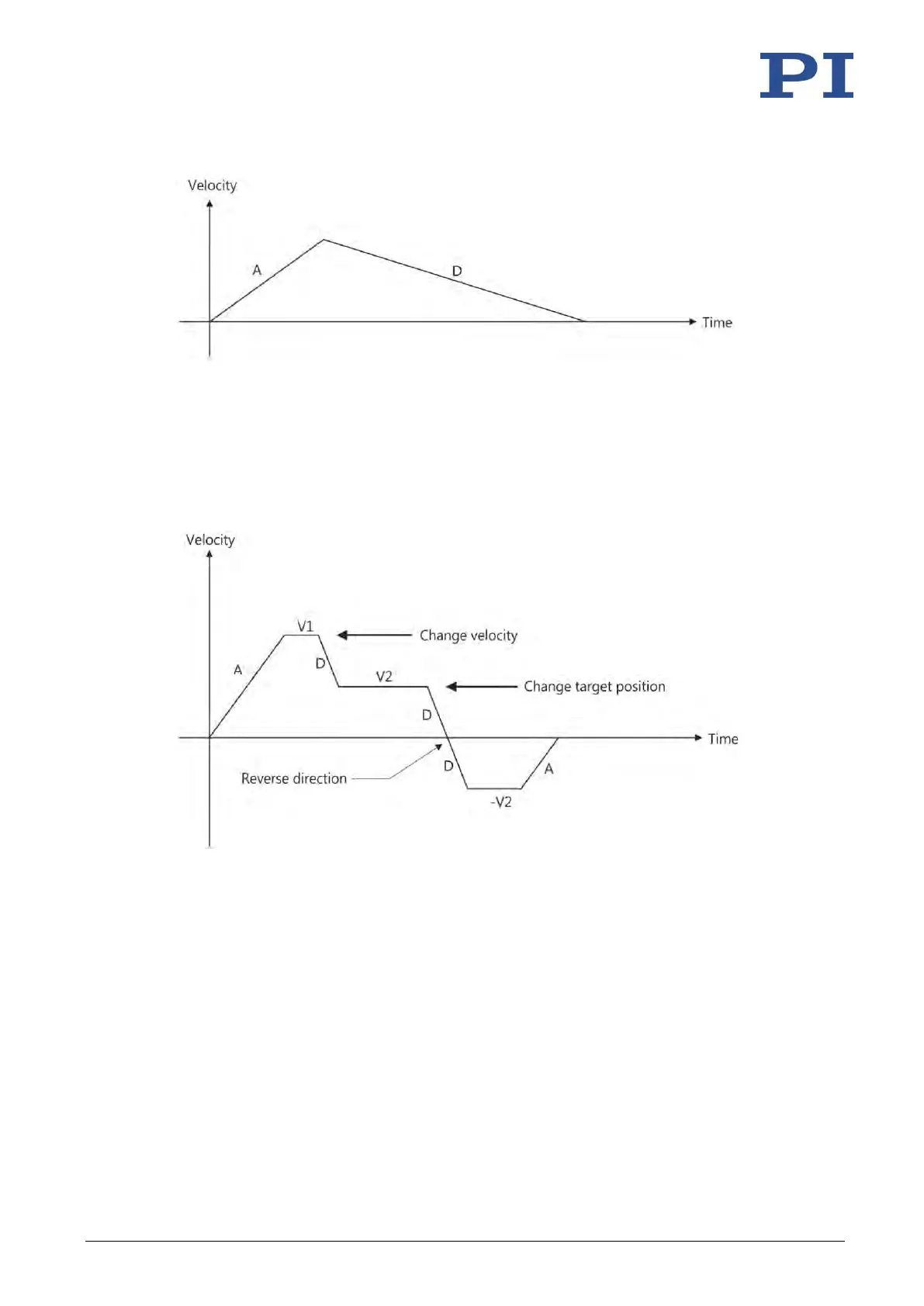
Figure 5: Basic trapezoidal velocity profile; A = acceleration, D = deceleration, no constant velocity
The edges for acceleration and deceleration can be symmetrical (acceleration = deceleration) or
asymmetrical (acceleration ≠ deceleration). The acceleration value is always used at the start of
the motion. After that the acceleration value is used during an increase in the absolute velocity
and the deceleration value during a decrease in the absolute velocity. If no motion parameters
are changed during the course of the motion, the acceleration value is used until the maximum
velocity is reached and the deceleration value is used for the decrease in velocity down to zero.
Figure 6: Complex trapezoidal profile with parameter changes; A = acceleration; D = deceleration; V1,
V2, -V2 = velocities
All motion parameters can be changed while the axis is in motion. The profile generator will
always attempt to stay within the permissible motion limits specified by the motion
parameters. If the target position is changed during the motion so that overshooting is
unavoidable, the profile generator will decelerate to the extent of stopping and reverse the
direction of motion in order to reach the specified position.