246 Version: 1.2.1 MS249E C-863.12 Mercury Controller
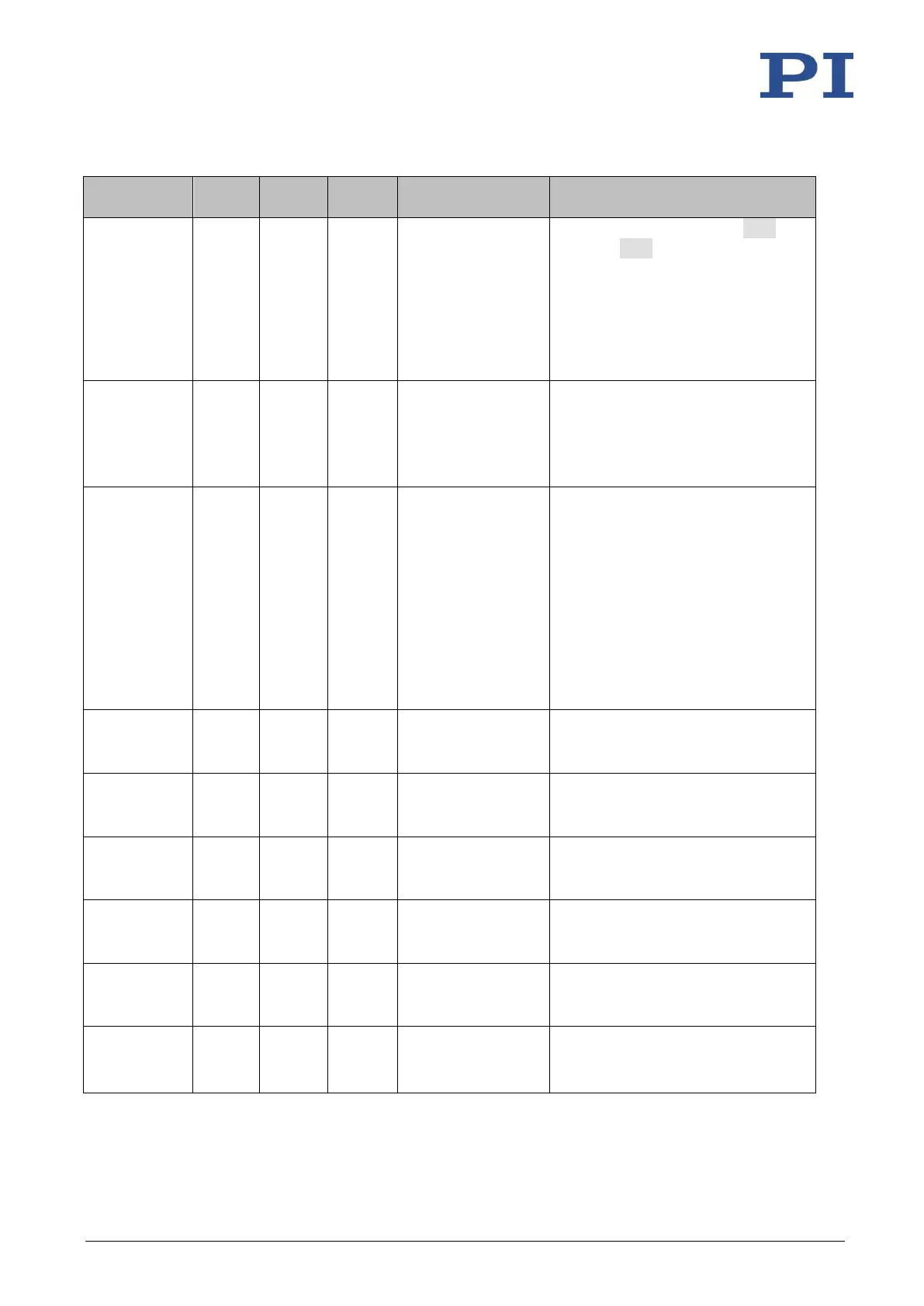
coupled to each other, see BRA (p.
132) and SVO (p. 195).
The setting only takes effect when
parameter 0x1A has the value 1
("brake available").
The signals from the brake driver are
output to pins 9 and 16 of the
Motor socket (p. 265).
Brake Activation
Voltage (V)
Supply voltage for releasing the
brake
0 to 48 V
Is only used when parameters 0x1A
and 0x3094 each have the value 1.
Brake Continuous
Voltage (V)
Supply voltage fore keeping the
brake released permanently
0 to 48 V
Should be smaller than the value of
parameter 0x3095. To prevent heat
from building up too much,
continuous supply of voltage to the
brake should be kept as low as
possible.
Is only used when parameters 0x1A
and 0x3094 each have the value 1.
0 to 32767; details see "Servo
Algorithm and Other Control Value
Corrections" (p. 21).
0 to 32767; details see "Servo
Algorithm and Other Control Value
Corrections" (p. 21).
0 to 32767; details see "Servo
Algorithm and Other Control Value
Corrections" (p. 21).
0 to 32767; details see "Servo
Algorithm and Other Control Value
Corrections" (p. 21).
0 to 32767; details see "Servo
Algorithm and Other Control Value
Corrections" (p. 21).
Unit symbol
For details, see "Physical Units" (p.
15).