Chapter 6 Troubleshooting
64
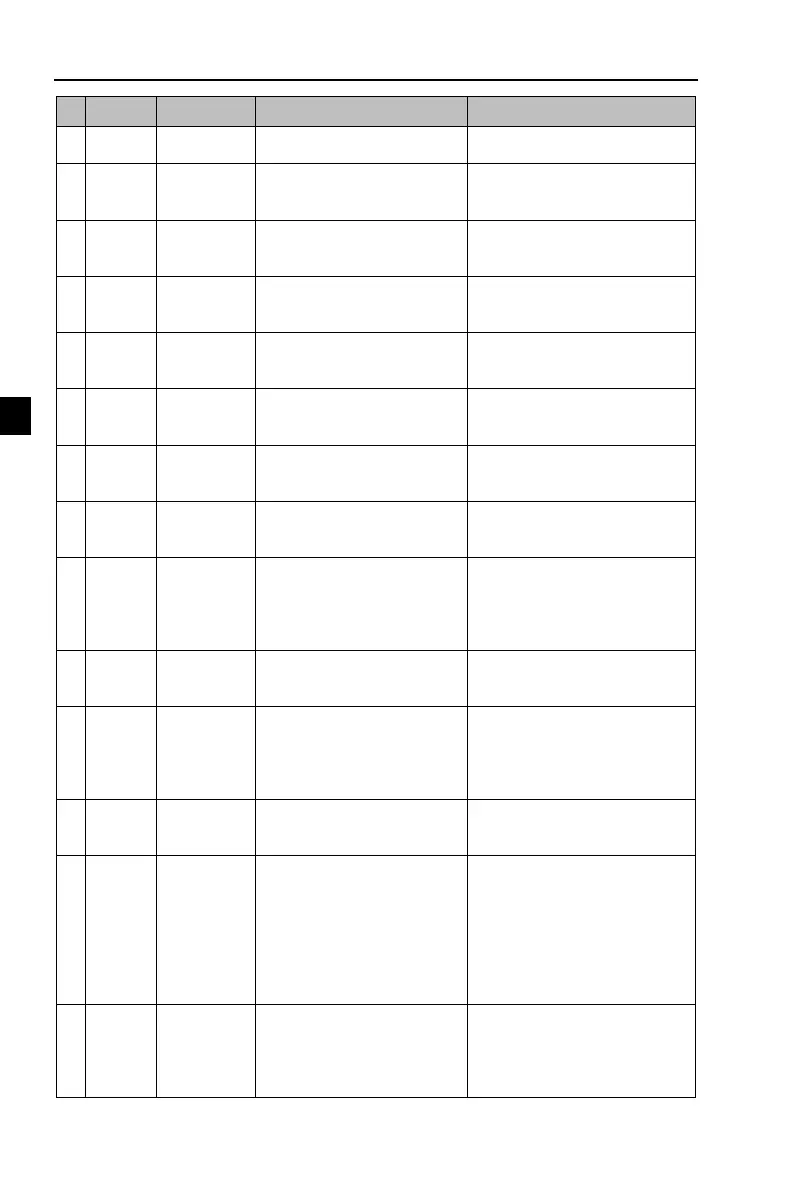
4.the encoder connection has
error
conditions
4.eliminate the line fault
EEPROM
read and
write fault
Replace the main control panel
1.overvoltage
2.overcurrent
1.eliminate overvoltage fault
2.eliminate overcurrent fault
Short-circuit
to ground
fault
Replace the cable or motor
Cumulative
running time
arrival fault
Cumulative running time
arrival fault
Clear history information by
using initialization function
parameters
Input custom fault 1 signal
through the multi-function
terminal DI
Input custom fault 2 signal
through the multi-function
terminal DI
Total power-
on time
arrival fault
Total power-on time reaches
the set value
Clear history information by
using initialization function
parameters
The inverter running current is
less than F8.31
Confirm whether the load is
removed or not or the settings for
parameter(F8.31, F8.32) accord
with the Actual operating
conditions
PID feedback
loss when
running fault
PID feedback is less than the
set value of E2.11
Check PID feedback signal or set
E2.11 to an appropriate value
Quick
current
limiting fault
1.whether the load is too large
or the motor stall occurs
2.the type selection of inverter
is small
1.reduce the load and check the
motor and its mechanical
conditions
2.choose the inverter with large
power level
Switch motor
when
running fault
Change current motor through
the terminal when the inverter
is running
Switch motor after the inverter
stops
Too large
speed
deviation
fault
1.the setting for Too Large
Speed Deviation
parameters(F8.15, F8.16) is
unreasonable.
2.the setting for encoder
parameters is incorrect
3.the parameter was not
identified
1.reasonably set the detection
parameters
2.correctly set encoder
parameters
3.perform identification for the
motor parameters
1.the parameter was not
identified
2.the setting for encoder
parameters is incorrect
3.the setting for motor
1.perform identification for the
motor parameters
2.correctly set encoder
parameters
3.reasonably set the detection

 Loading...
Loading...

