The disadvantage of a mechanical detection system is the relatively high
force required to lift the head, which does not work for very thin materials
that bend during detection.
The tactile system ( OHMIC ) does not have this disadvantage.
10.2 OHMIC – touch / contact system.
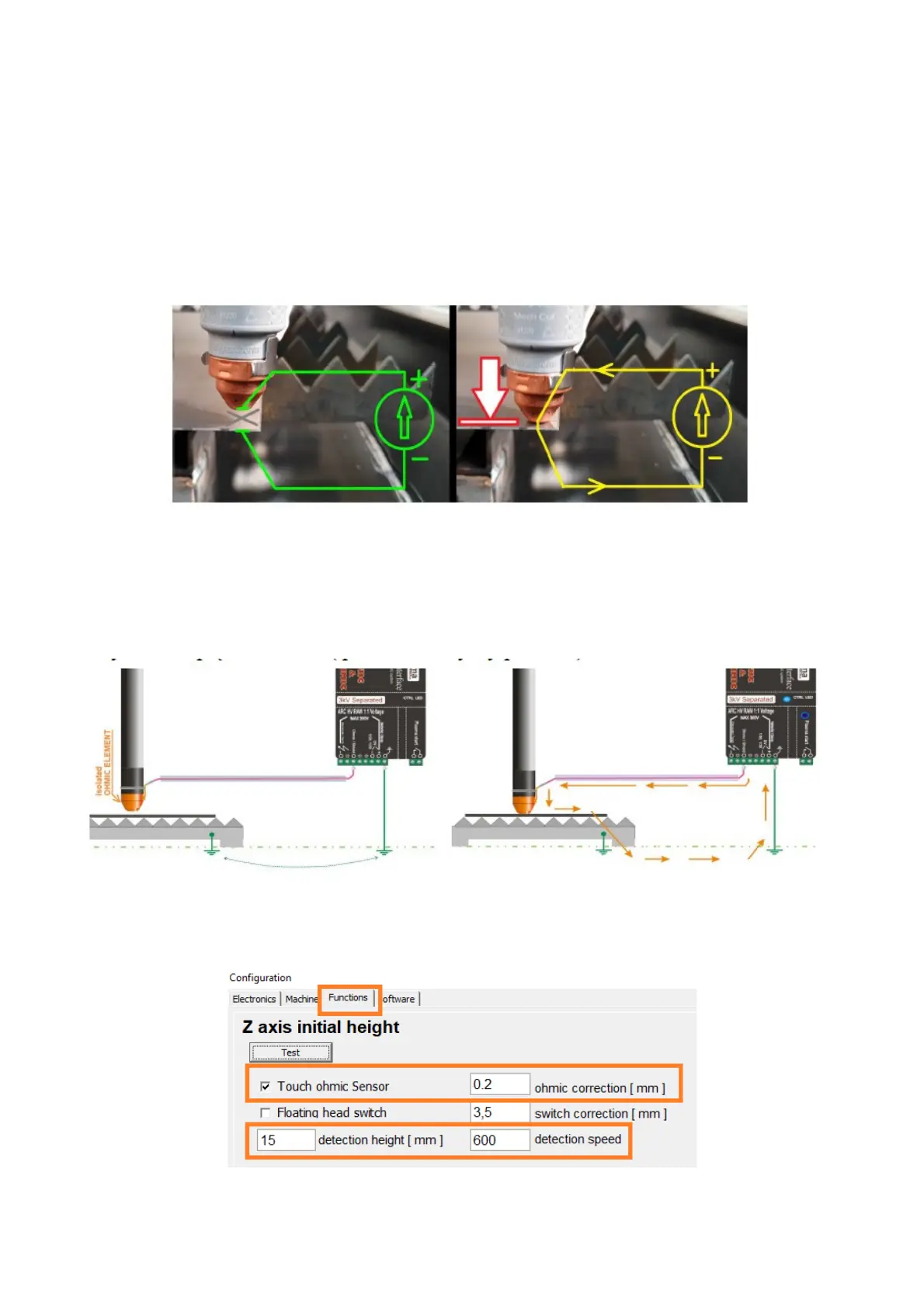
The OHMIC system is based on the closing of an electrical circuit
when an OHMIC element isolated from the nozzle is touched ( not to be
confused with the torch nozzle ).
For the system to work correctly the machine (material) and the plasma
interface must be earthed so that the circuit can be closed. For HF/HV
sources, the cable leading from the OHMIC to the Interface should be
adequately insulated ( preferably double insulated ) because high HF/HV
voltages may appear on it ( electric breakdown from the torch nozzle ).
The configuration is similar to that of mechanical detection, and a
touch to the material is signalled in the main program window as well as
by the rapid blinking of the control LED of the plasma interface :
32