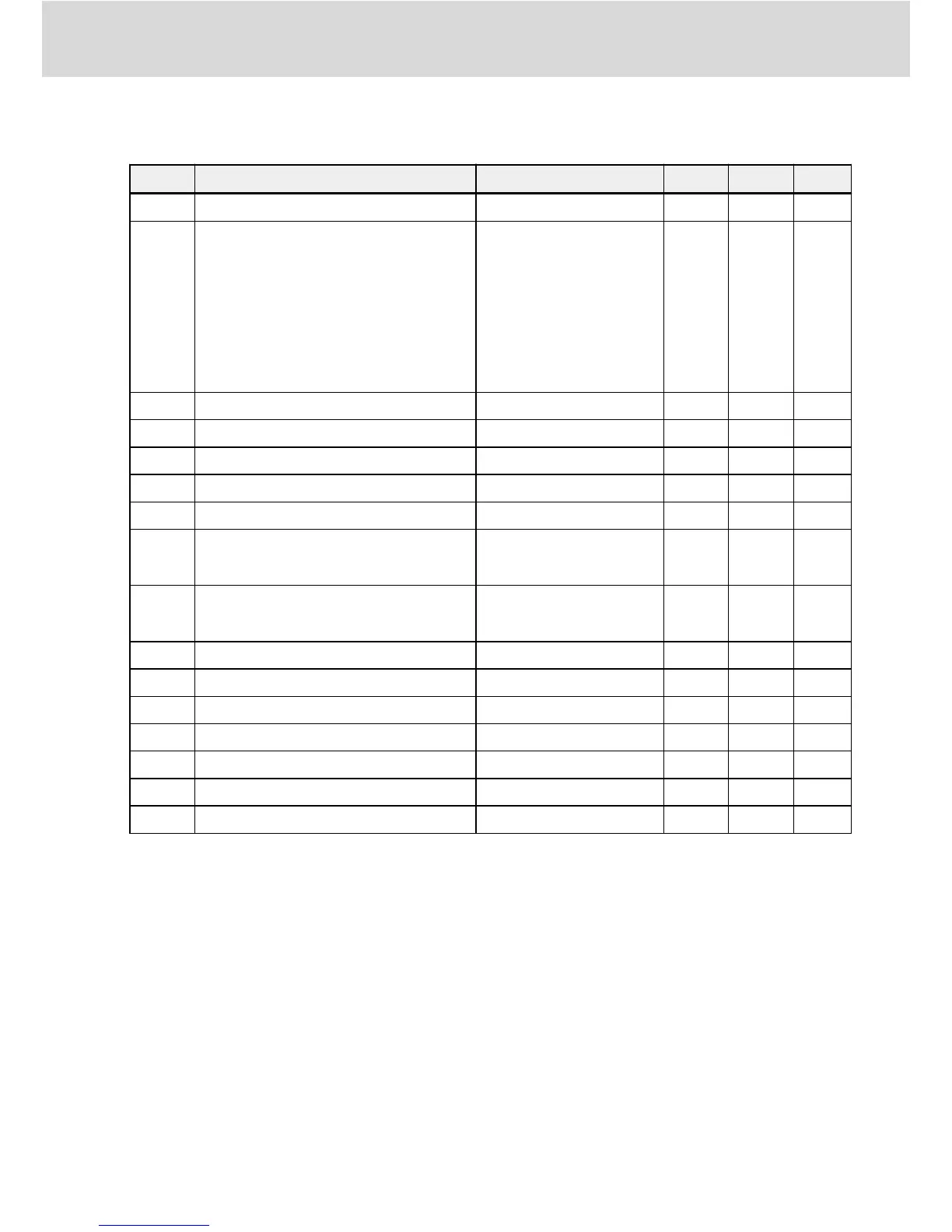
E4: PID control parameters
Code Name Setting range Default Min. Attri.
E4.00 PID reference channel 0...10 0 – Stop
E4.01 PID feedback channel
0: AI1 analog input
1: AI2 analog input
2: X5 pulse input
3: EAI1 analog input
4: Encoder card speed
5: EAI2 analog input
0 – Stop
E4.02 PID reference / feedback factor 0.01...100.00 1.00 0.01 Run
E4.03 PID engineering analog reference 0.00...10.00 0.00 0.01 Run
E4.04 PID engineering speed reference 0...30,000 rpm 0 1 Run
E4.05 PID feedback polarity 0: Positive; 1: Negative 0 – Stop
E4.15 Proportional gain - P 0.000...60.000 1.500 0.001 Run
E4.16 Integral time - Ti
0.00...100.00 s
(0.00: no integral)
1.50 0.01 Run
E4.17 Derivative time - Td
0.00...100.00 s
(0.00: no derivative)
0.00 0.01 Run
E4.18 Sampling period - T 0.01...100.00 s 0.50 0.01 Run
E4.19 PID feed forward dynamic limit 0.00…100.00 % 10.00 0.01 Run
E4.20 PID feed forward minimum value 0.00…100.00 % 0.00 0.01 Run
E4.30 PID deadband 0.0...20.0 % 2.0 0.1 Run
E4.31 PID regulation mode 0, 1 0 – Run
E4.32 PID engineering value detection width 0.01...100.00 1.00 0.01 Run
E4.33 PID feed forward settings 0: Inactive; 1: Active 0 – Stop
Setting range of E4.00:
0: Inactive; 1: Panel potentiometer; 2: Panel button
3: AI1 analog input; 4: AI2 analog input; 5: X5 pulse input
6: EAI1 analog input; 7: Communication; 8: Analog reference E4.03
9: Speed reference E4.04; 10: EAI2 analog input
Setting range of E4.31:
0: Stop integral regulation when frequency arrives at upper / lower limit
1: Continue integral regulation when frequency arrives at upper / lower limit
EFC 3610 / EFC 5610
Bosch Rexroth AG
Start-up
DOK-RCON03-EFC-X610***-QU11-EN-P
61/87

 Loading...
Loading...



