Rockwell Automation Publication 843ES-UM001A-EN-P - February 2020 91
Use of Controller-based Safety Functions with the 843ES CIP Safety Encoder Appendix D
Homing
Setting the Actual Position output to the Home Position input (homing) of the
instruction is required if a position-based drive safety instruction like Safely
limited Position (SLP) is used. If a position-based drive safety instruction is not
being used on an axis, homing the SFX instruction is not required.
The data in Encoder Safety Configuration and motor unwind value is used to
populate the SFX instruction.
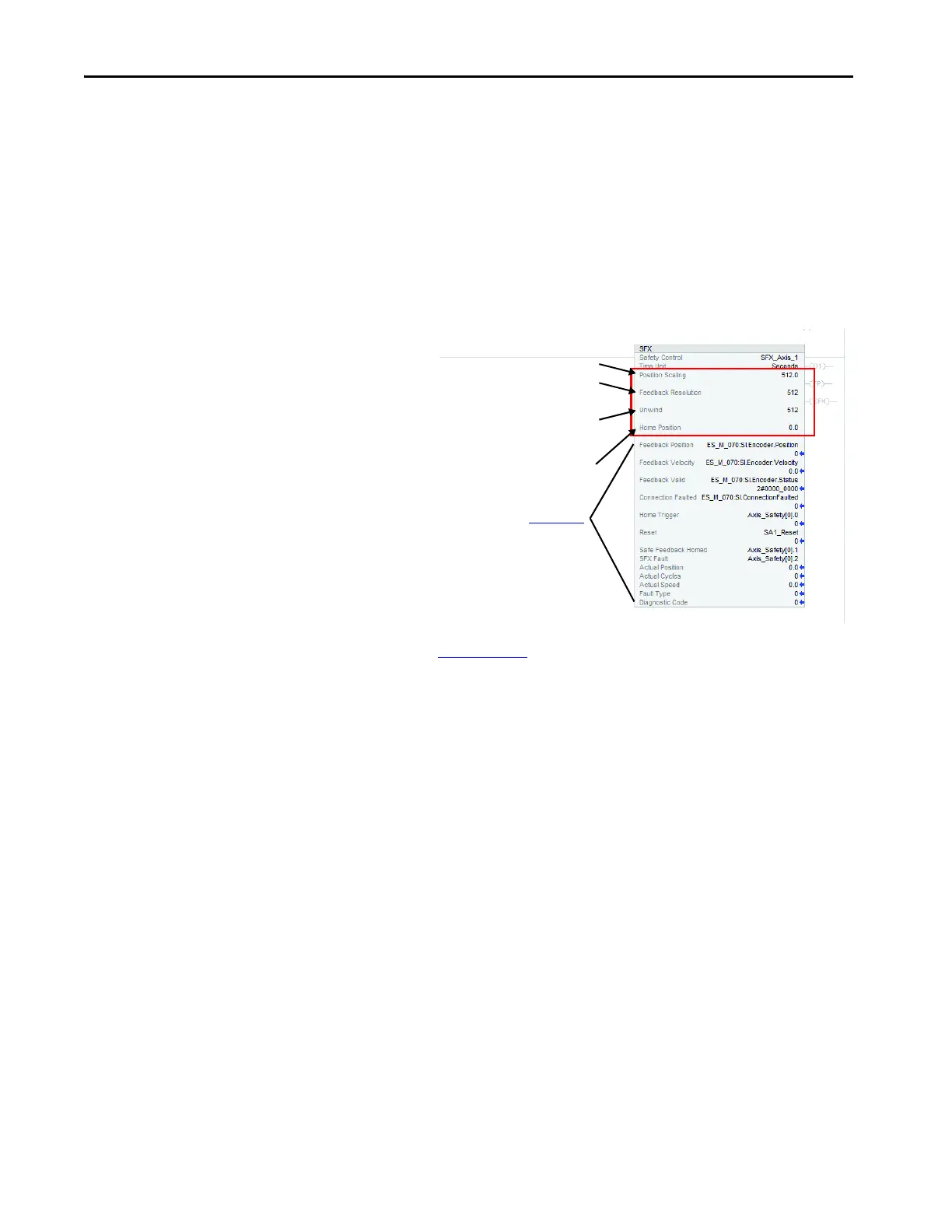
Figure 18 - SFX Instruction Example
See publication 1756-RM095, for more information on the Drive Safety
instructions.
Pass-through Data in Controller
When using a drive that does not have pass-through data for the Drive Safety
instruction outputs, the pass-through has to occur in the controller to command
the standard or motion control when a drive safety instruction is on. You can use
safety tags as inputs in the standard or motion control, but not as an output.
Position Scaling value
Feedback Resolution value
Unwind value as specified for the VPL-B0631T-W
rotary motor used in this example.
Used only with position-based
drive safety instructions
See publication 1756-RM095

 Loading...
Loading...