CONTROLLER
:
STEPPER CIRCUIT
1
srEP
DIRECTION
SEEK COMPLETE
HEAD SELECT
READY
1
0,1,2
TRACK 0
1
STEPPER MOTOR
+ +
DRIVE
r--
SELECT
1
:.
WRITE CIRCUIT
INDEX
~
MICROPROCESSOR
IWR
CIRCUIT (6500)
MOTOR
VOLTAGE
SPINDLE SPEED
1
-
CONTROL LSI
TRACK
0
H--
1
CIRCUIT
1
SPINDLE MOTOR
7.0
MICRO-
PROCESSOR
FIGURE
25:
MPU:
PC
Board
20292-XXX
MPU:
PC
BOARD 20292-XXX
7.1
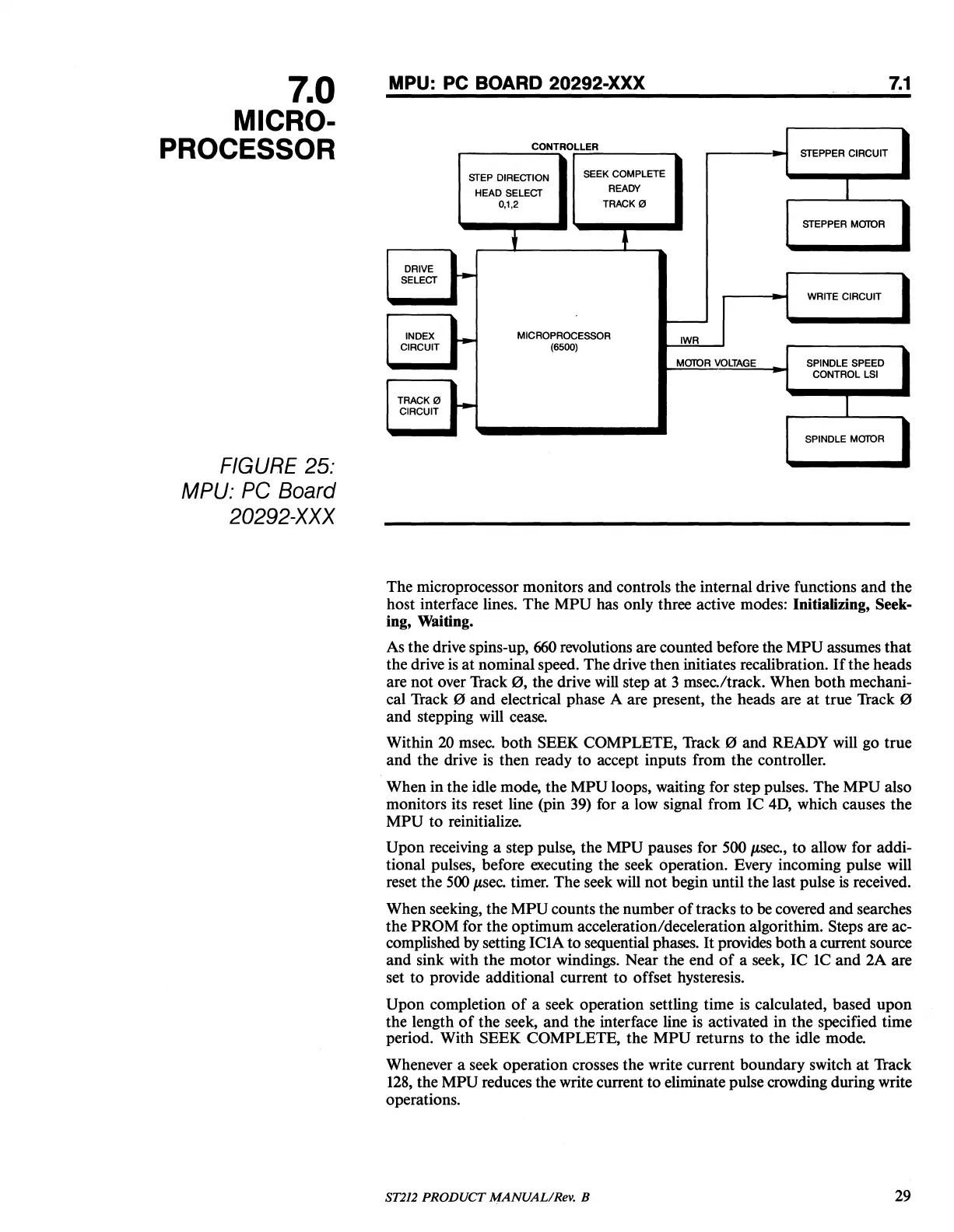
The microprocessor monitors
and
controls the internaI drive functions
and
the
host interface lines.
The
MPU
has only three active modes: Initializing, Seek-
ing, Waiting.
As
the
drive spins-up, 660 revolutions are counted before the
MPU
assumes
that
the drive is
at
nominal
speed.
The
drive
then
initiates recalibration.
If
the
heads
are
not
over Track
0,
the drive will step
at
3 msec./track.
When
both
mechani-
cal Track
0
and
electrical phase A are present,
the
heads are
at
true Track 0
and
stepping will cease.
Within
20
msec.
both
SEEK
COMPLETE,
Track 0
and
READY will go
true
and
the drive is
then
ready
to
accept inputs from
the
controller.
When
in
the
idle mode,
the
MPU
loops, waiting for step pulses. The
MPU
also
monitors its reset line (pin 39) for a Iow signal from
IC4D,
which causes
the
MPU
to
reinitialize.
Upon
receiving a step pulse,
the
MPU
pauses for 500
p,sec.,
to
allow for addi-
tional pulses, before executing the seek operation. Every incoming pulse will
reset the 500
p,sec.
timer.
The
seek will
not
begin until
the
last pulse
is
received.
When
seeking,
the
MPU
counts the number
of
tracks
to
be covered
and
searches
the
PROM
for
the
optimum
acceleration/deceleration algorithim. Steps are ac-
complished by setting IC1A
to
sequential phases.
It
provides
both
a current source
and
sink with
the
motor
windings.
Near
the
end
of
a seek,
IC
1C
and
2A
are
set
to
provide additional current
to
offset hysteresis.
Upon
completion
of
a seek operation settling time
is
calculated, based
upon
the Iength
of
the
seek,
and
the
interface line is activated
in
the
specified time
periode With SEEK
COMPLETE,
the
MPU
returns
to
the
idle mode.
Whenever
a seek operation crosses
the
write current
boundary
switch
at
Track
128,
the
MPU
reduces the write
CUITent
to
eliminate pulse crowding during write
operations.
ST212
PRODUCT
MANUAL/Rev.
B
29