SCORPIO 38’ - 45’ - PARTS AND COMPONENTS DESCRIPTION - Telescopic arm
Version 1.02 May 27, 2022
22
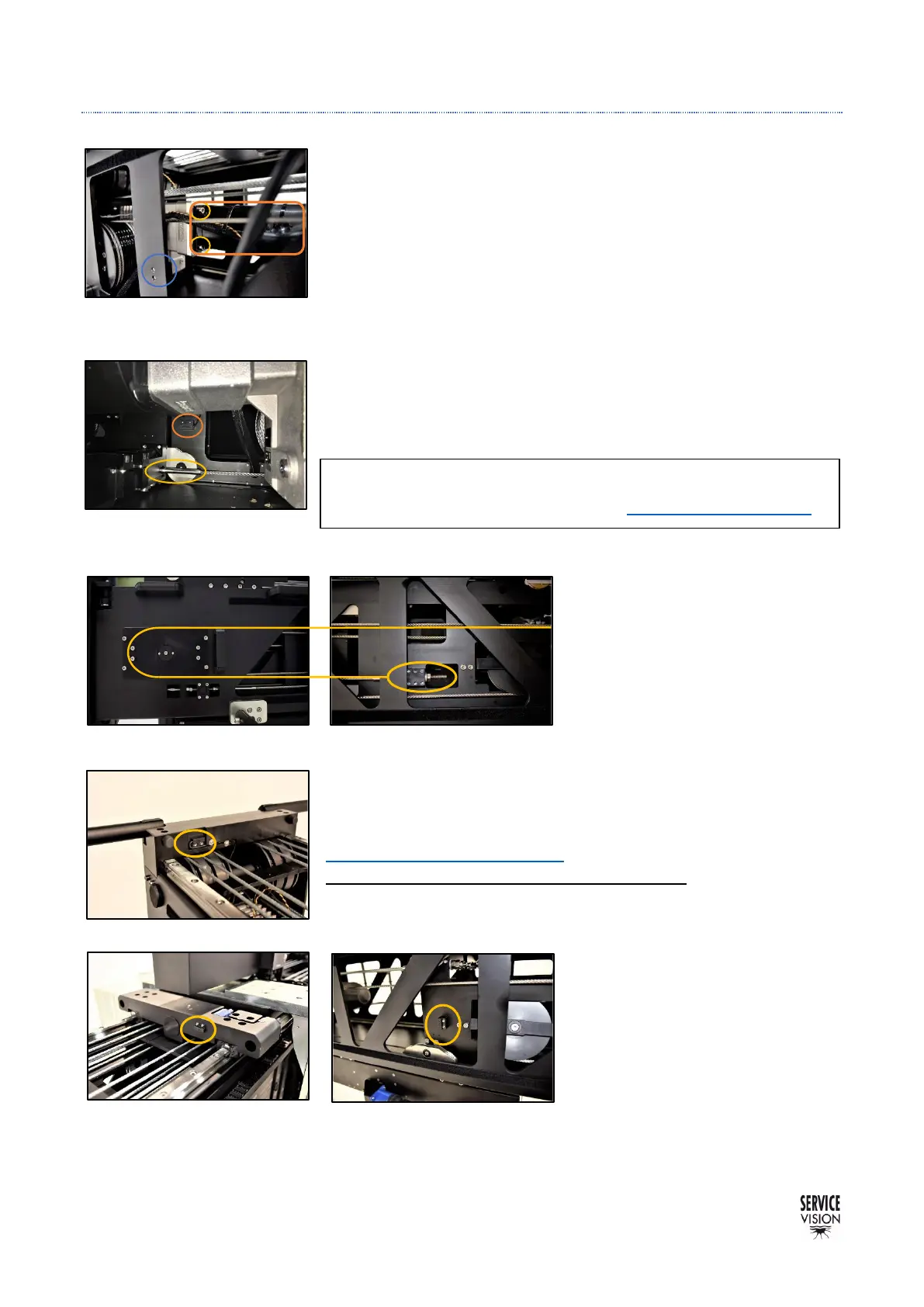
2.4.1.1 INSIDE THE MAIN SECTION, MOVING THE FIRST SECTION
Inside the main section there is located the motor of the arm. This
motor has an encoder attached to it to control the position of the
crane. The motor is held with 4 screws into the gearbox. And this
gearbox is attached to two drums, one in each side of the main
section. This motor transmits the movement into a gearbox and this
one makes the to two drums coil in one or other direction.
Into the drums there are two cables attached: when one is coiled,
the other uncoils. These cables are rolled one faced against the
other, one from the top part of the drum and the other from the
bottom. The end of the bottom cable is attached into the back of the
First section (the first telescopic section). When the drum coils the
cable, the First section is pulled inside.
To extend the first section, the
upper cable from the drum passes
through a pulley attached into the
main section and ends in the
attachment showed in fig. 02.52
from the First section. So, when the
drum coils the cable, the first section
goes out.
To know where the telescopic limits of the crane are, the SCORPIO
cranes have two magnetic sensors attached into the main section.
These magnetic sensors are only used when the crane is started (see
chapter 3.2 Starting the crane). They will give to the system the
reference position of the telescopic movement. Only one of these
limits needs to be detected by the crane and the system will
automatically know what the range of movement for the telescopic is.
When the First section is
retracting, it approaches the magnet
(fig.02.55) into the retracted sensor
(fig.02.50). When the First section
extends, the counterweight trolley
moves back and approaches the
magnet(fig.02.54) into the extension
limit (fig.02.53).