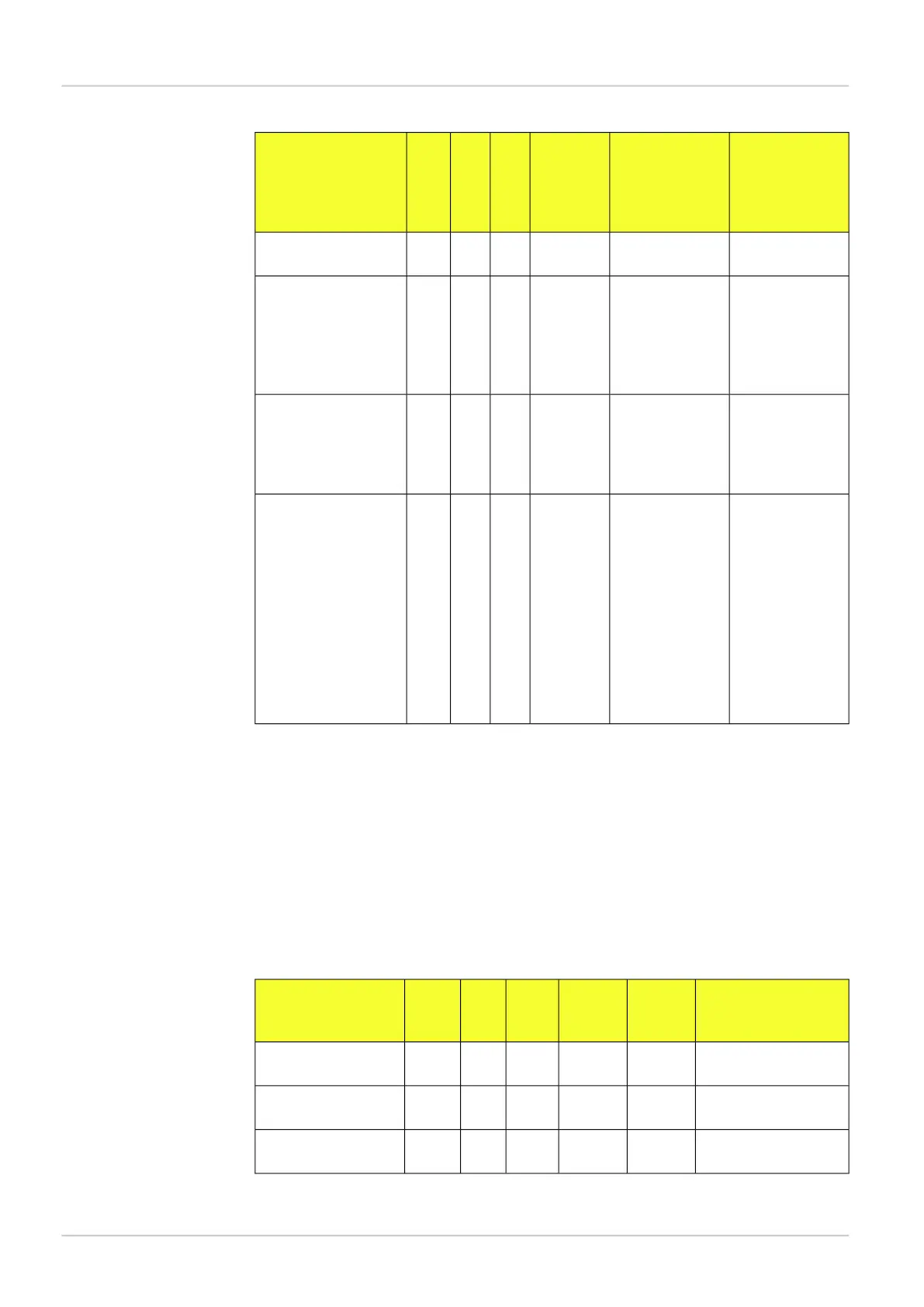
RangeReturn valuesArgumentsUs-
able
in
Run
mode
Iden-
tifier
Com-
mand
Description
ticks, 200000
ticks]
[0,19], [0=ms,
1=tick],
int outputIn-
dex, int
No23sINTSet digital output act-
ive time
[1,10000] resp [0type, int
ticks, 200000
ticks]
time (milli-
seconds*10
or ticks)
[0,19], [0=ms,
1=tick],
int type, int time
(milliseconds*10
or ticks)
int outputIn-
dex
Yes23gINTGet digital output act-
ive time
[1,10000] resp [0
ticks, 200000
ticks]
[0=A, 1=B, 2=C,
3=D]
int pointIn-
dex,
No300sINTSet alignment control
point
i
int x * 100, [-
2147483648,
2147483647]
int x * 100,
int y * 100
int z * 100
int y * 100, [-
2147483648,
2147483647]
int z * 100, [-
2147483648,
2147483647]
a
While possible to trig over all interfaces, it is recommended to use only the following for high speed applications:
• Digital I/O (In3)
• Ethernet Raw (port 2116)
• EtherNet/IP (small assembly)
b
The exposure is expressed in ms multiplied by 100 i.e. 3.8 ms is expressed as 380
c
The result is 0= normal mode or 1= calibration mode.
d
The result is 0= not calibrated or 1= calibrated.
e
The result is expressed in mm/pixel x 10000.
f
The result is expressed in pixels for x and y.
g
The result is expressed in degrees.
h
The delay is expressed in ms multiplied by 10 i.e. 1.5 ms is expressed as 15
i
In order for the settings to take effect the aACT 7 command needs to be sent to the device
Table B.7 Command channel functions - Object locator
RangeReturn
values
Argu-
ments
Usable
in Run
mode
Identi-
fier
Com-
mand
Description
[0, 100], percentint
threshold
No32sINTChange object locator
match threshold
[0, 100], percentint
threshold
Yes32gINTGet object locator
match threshold
0=off, 1=onint modeNo33sINTChange object locator
rotation search mode
8015726/2013-11
©SICK AG • Advanced Industrial Sensors • www.sick.com • All rights reserved
Subject to change without notice
58
Reference Manual
Command channel
Appendix
Inspector PIM