DL100 Series Universal Low-Power Inverter
56 Detailed Description of Functions
This parameter is used to determine the display content of the operation panel in
the status monitoring mode.
Monitoring parameter selection is used to determine the display content of the
LED.
The physical quantity corresponding to the displayed data can refer to the state
monitoring parameter table.
This parameter sets the display value of the running linear velocity and the set
linear velocity, and can also be used to display other physical quantities that are
proportional to the output frequency.
6.8 PID parameter group
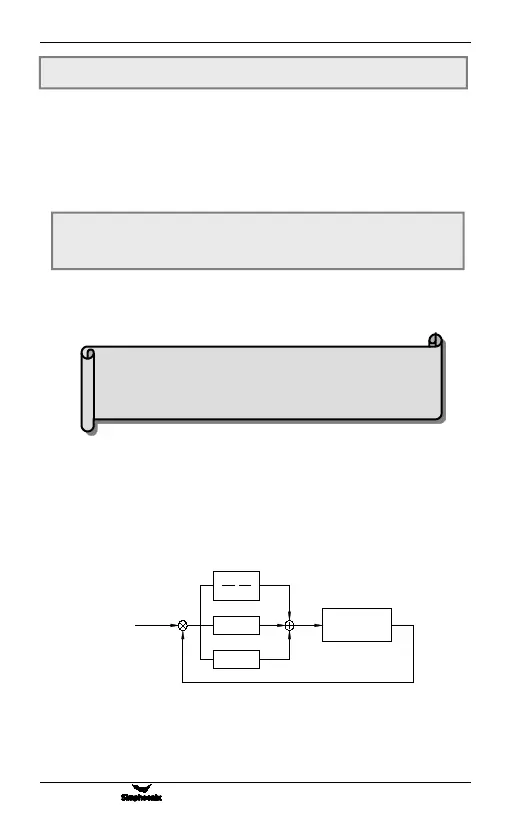
PID control adjusts the output frequency of the inverter by calculating the
difference between the feedback value of the controlled system and the target
value to adjust the output frequency of the inverter to stabilize the controlled
system at the target signal. The schematic diagram is shown in Figure 6-17.
Figure 6-17 PID function diagram
F6.11 Linear speed coefficient setting
Predetermined area
:
0.001 ~ 60.000
F6.10 Monitoring parameter selection Predetermined area
:
0 ~ 20
Running line speed(d-8)= F6.11 × Output frequency (d-0)
Set line speed(d-9)= F6.11 × Set frequency (d-7)
Td*S+1
P
Controlled
sustem
Target value
+
-
Feedbak value
Ti S
1
1