Y070.301/EN Page 33
Operation instructions
SIPOS SEVEN ECOTRON
5
Commissioning
5 Commissioning
Motor protection
The motor is equipped with full electronic motor protection against thermal damage. The motor
protection is activated in the factory.
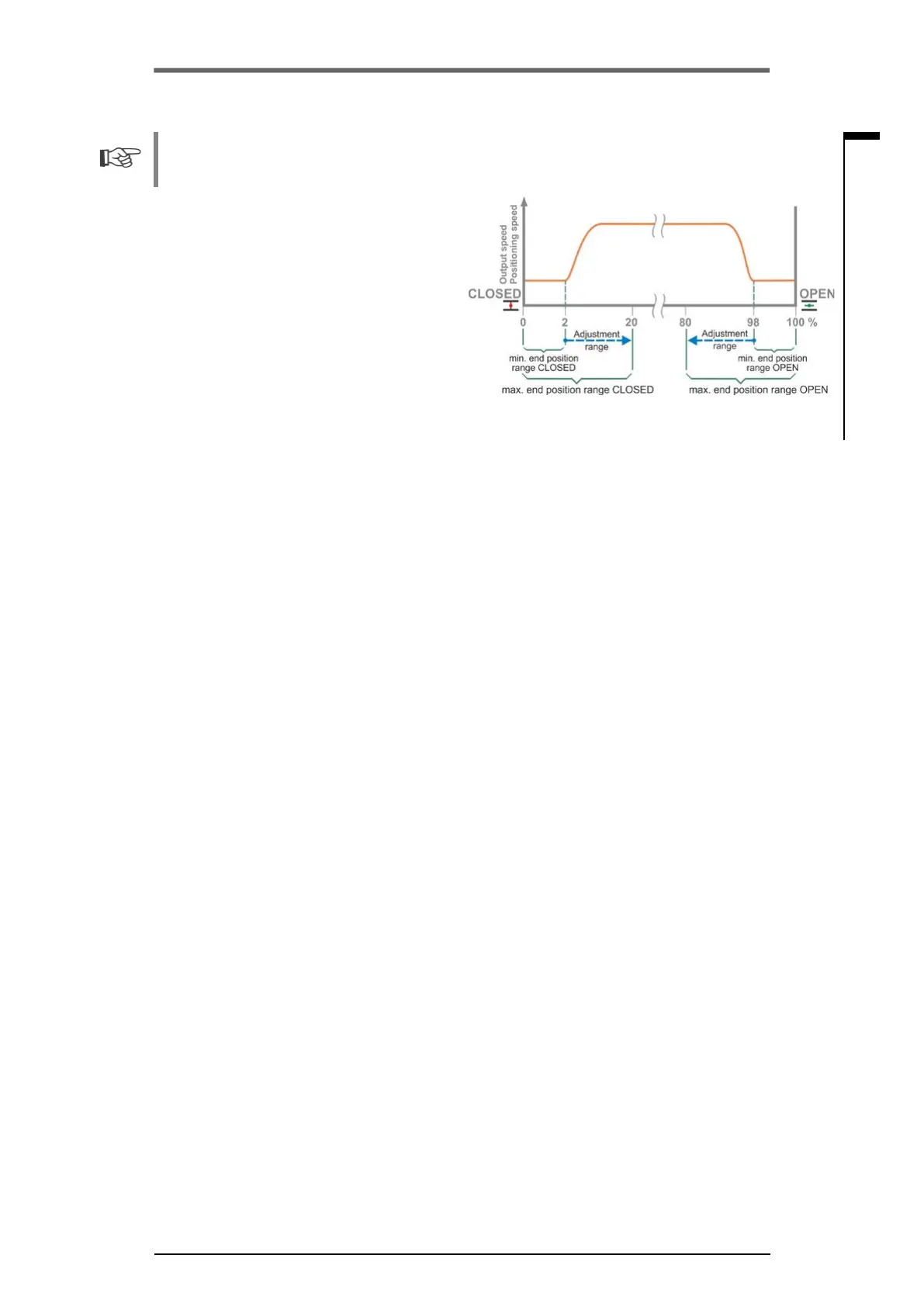
End position range
Within the end position range, travel is at a low
speed (positioning speed or long positioning
time). In the event of torque dependent actuator
tripping outside this range, a fault is detected
(„Status and fault signals“ on page 17).
5�4�1 DC link voltage limitation
During actuator standstill, high connection voltages (operating voltage above the voltage tolerance
of up to +15 %) will increase the DC link voltage, which will be electronically limited to a permissible
value.
Deactivating this function is only useful for very specic plant conditions and should only be per-
formed after consulting SIPOS!
5�4�2 Runtime monitoring
As standard, SEVEN actuators are equipped with runtime monitoring. When running the actuator
for the rst time over a distance of at least 3 % of the entire travel after setting the end positions, the
runtime is measured and stored in a non-volatile memory. The actual motor frequency or speed is
taken into account during the measurements.
During future operation, it will be checked whether the position reached after the runtime is plausi-
ble. Tolerances due to different loads and measurement inaccuracies during position measurement
are taken into account. If the expected position is not reached in time, the actuator changes over to
the “fault” state and signals “runtime error”.
This internal monitoring can be deactivated, i.e. exceeding the runtime will not cause a fault signal.
This can prove useful for special applications.
Runtime monitoring is activated on delivery.
5�4�3 End position speed
Within the end position ranges, the actuator operates at an end position speed dened for each
device to change to the dened speed when leaving the end positions.
For extremely long total runtimes, it may be desired that the actuator changes as quickly as
possible, even before leaving the end position range to the adjusted, typically high speed. It may,
however, also be required that the actuator operates as long as possible at the dened speed when
approaching the end position to be able to quickly stop in the end position.
Refer also to “End position range“ on the previous page and chapter „Adjust speeds/positioning
times“ on page 30.
Fig�: End position ranges

 Loading...
Loading...