4 | Network structure STOBER
12
02/2020 | ID 443025.06
4 Network structure
An EtherCAT network normally consists of an EtherCAT master (controller) and EtherCAT slaves, i.e. drive controllers from
the SC6 or SI6 series in combination with components from third-party manufacturers. The SI6 drive controllers also require
at least one PS6 supply module as an energy supply.
The EtherCAT network structure is generally optimized for a line topology. Each EtherCAT slave has an incoming and
continuing bus connection.
Overall network expansion is virtually unlimited because a maximum of 65535 EtherCAT nodes can be connected together.
You can configure and parameterize the drive controllers using the STOBER DriveControlSuite DS6 software and the entire
EtherCAT network using the STOBER AS6 AutomationControlSuite development environment, for instance.
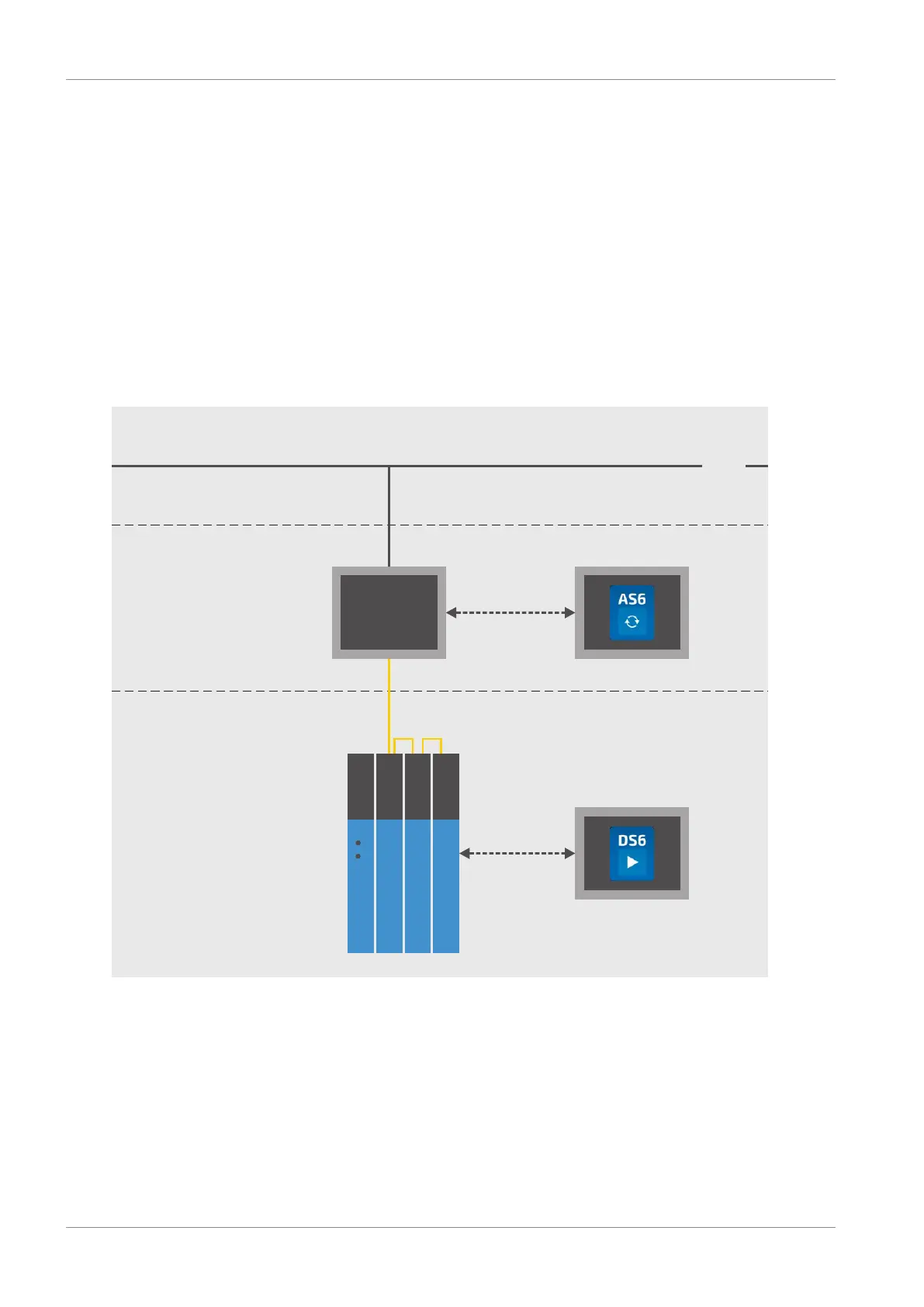
The following graphic provides a generalized depiction of an EtherCAT network with an EtherCAT master and EtherCAT
slaves, using the SI6 series as an example.
MC6 motion controller
EtherCAT
1 x supply module
3 x drive controlle
Commissioning
Commissioning
Command levelController levelField level
rs SI6
PS6
Fig.1: EtherCAT – Network structure, using the SI6 series as an example

 Loading...
Loading...




