STE 80722
– 47 –
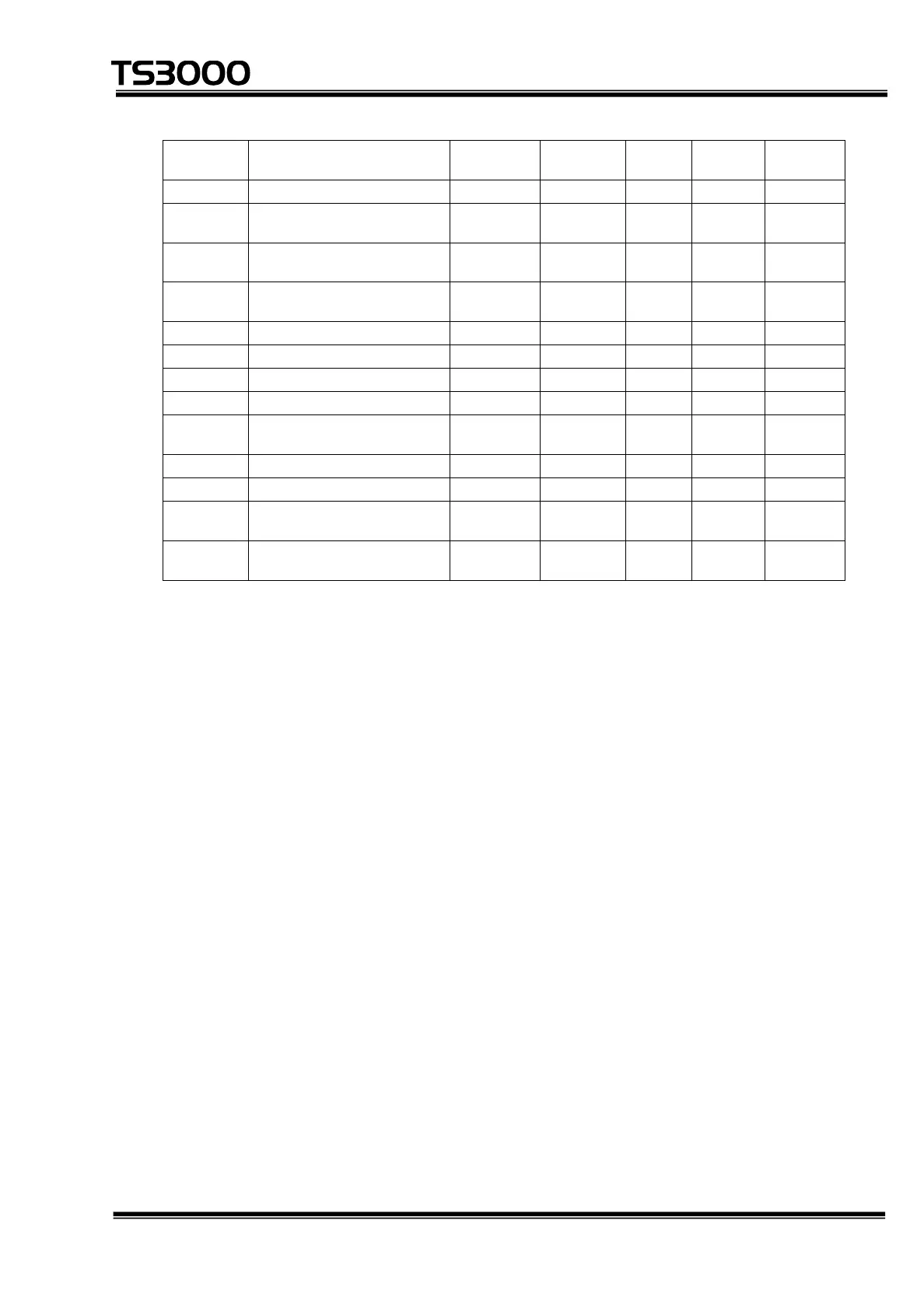
MP
Teaching point movement
execution
X X X
X
PS Current position acquisition
PR
Individual current information
acquisition
MN
Maintenance information
acquisition
RM
Maintenance information
reset execution
IO IO information acquisition
WD Watchdog execution
AH Alarm history acquisition
HO Output signal write X
X
X
X
VL
Robot tip speed information
acquisition
SM Motion status acquisition
HI Input signal read X
X
X
X
ZC
3-axis origin position change
information acquisition
EM
Controller mode change
execution
X X X
X
: Valid, X: Invalid, : Valid when the robot is stopped

 Loading...
Loading...





