STE 80722
– 1 –
Section 1
Introduction
This manual describes serial communication and ethernet communication between the
robot controller and an external computer. There are two procedures for data
transmission: non-protocol communication and simple protocol communication, each of
which can achieve the following functions.
Non-protocol communication
(1) Input variables into the program from the external device.
(2) Output variables or messages in the program.
Simple protocol communication
(1) Start and stop operation of the robot
(2) Program reset, step reset, cycle reset and output signal reset
(3) Servo ON/OFF
(4) Upload and download program files
(5) Erase program files
(6) Select programs
(7) Monitor the status of the robot
(8) Monitor for robot errors
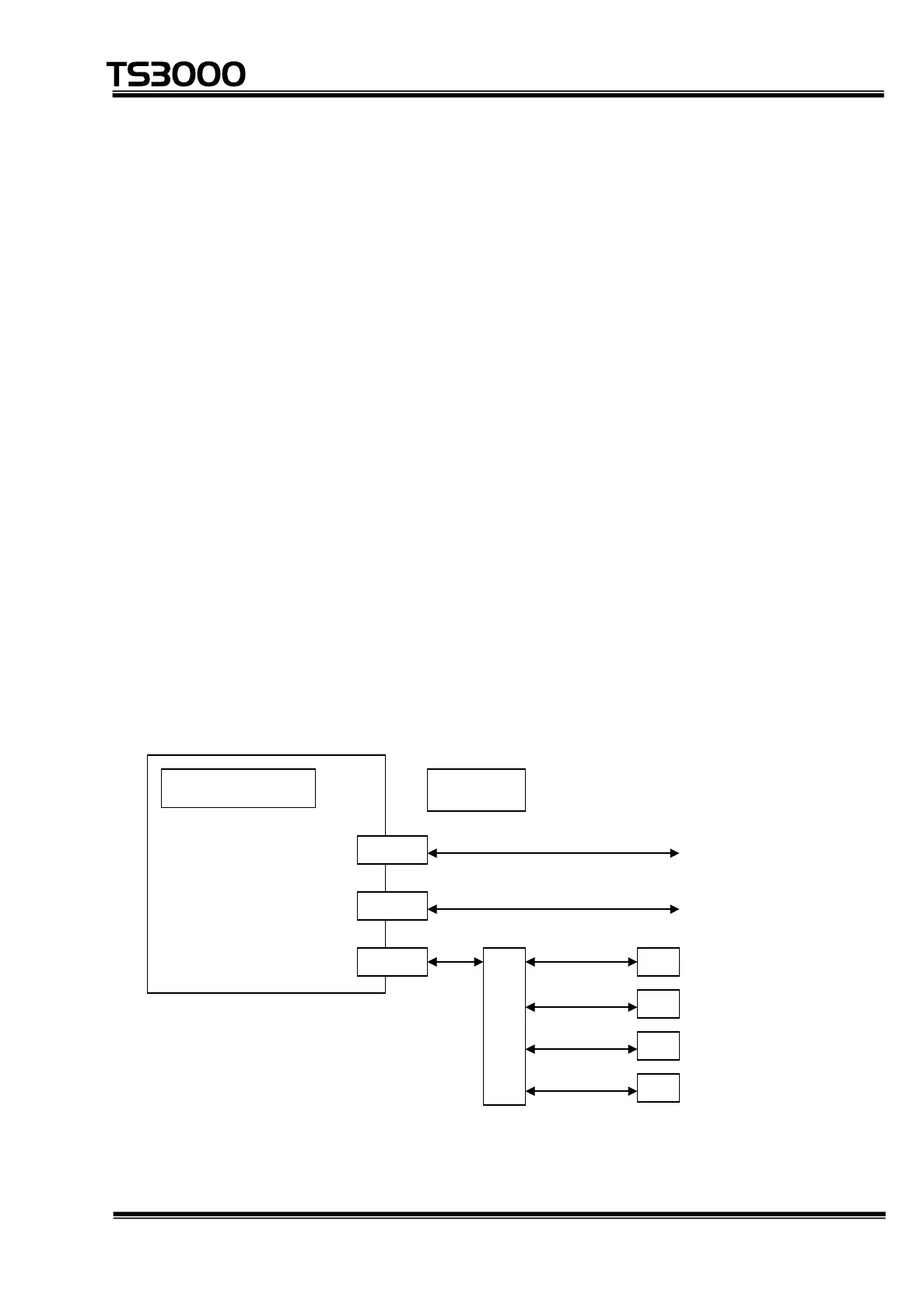
The communication interface configuration is as shown below.
Fig. 1.1 Communication interface configuration
COM1
HOST
Ethernet
Controller side User side
Non-protocol communication
communication
communication
communication
communication
Simple protocol communication
 Loading...
Loading...






