65
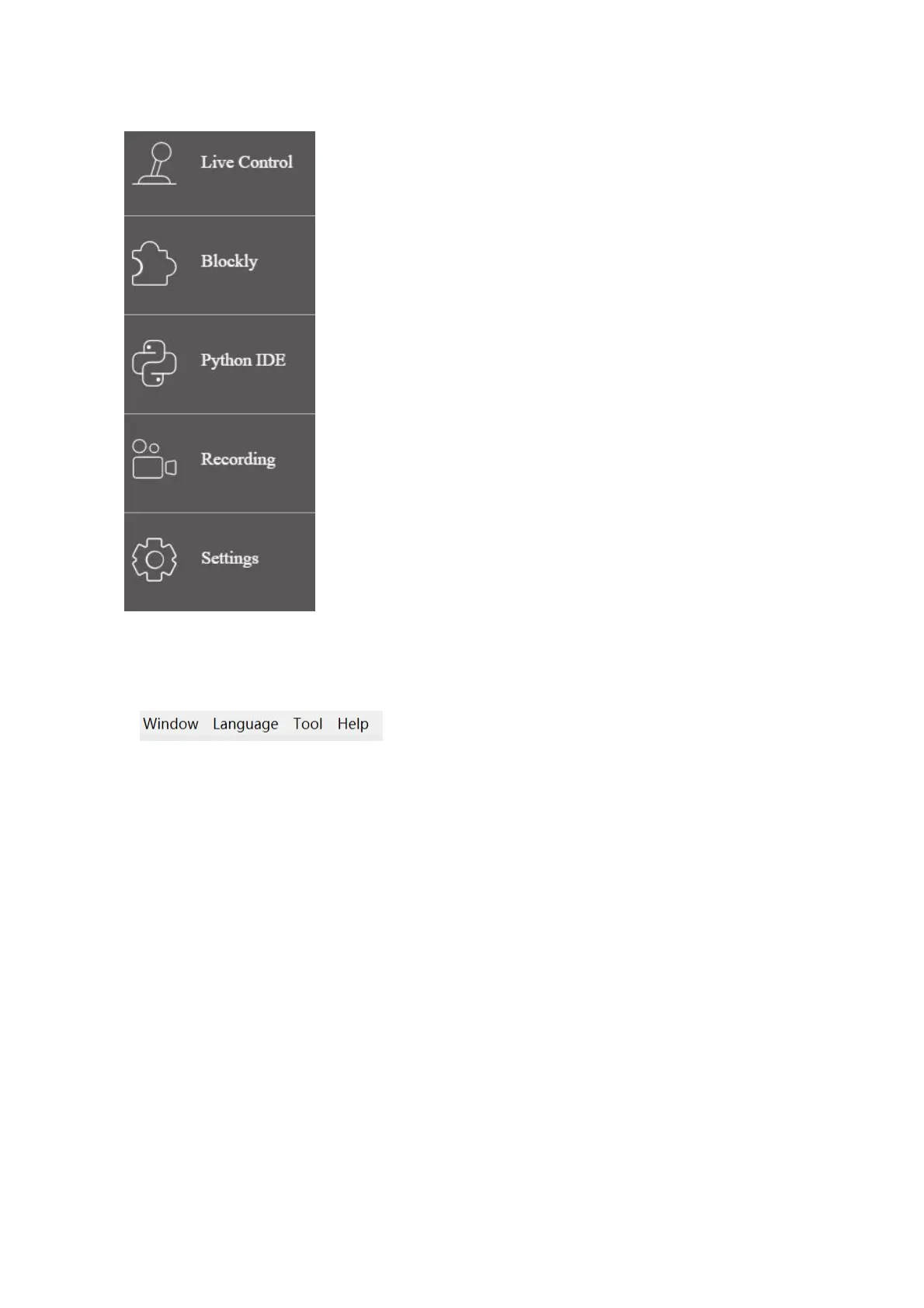
Live Control: Gives the ability to control the position of
the xArm and adjust its posture.
Blockly: A graphical programming tool that allows users to
achieve programming for the control of the robotic arm , I/O,
or end-effector by simply drag and drop the code blocks.
Python IDE: Python integrated development environment
that uses the xArm-Python-SDK API directly and has ability
to view the Python code generated by the Blockly project.
Recording: To record the trajectory of the robotic arm in
manual mode, the maximum recording time is 5 minutes.
Settings: Set the parameters of the robotic arm, upgrade the
system software, etc.
1.3.3 Toolbar
Window: To adjust its size, you can make a selection in the 【Window】 drop-down
menu or adjust the size by dragging the border of the window.
Language: Switch language in the upper right corner of the toolbar -【Language】
may switch between Simplified Chinese / English.
Tool: 【Tools】 - 【Search】 to return to the interface of ‘search the robotic arm’.
【Tools】 - 【Check for Updates】 to check the software updates.
Help: 【Help】Use the drop-down window to download the manuals of the robotic
arm, contact technical support, open forums, and visit GitHub.
 Loading...
Loading...





