86
1.4.8 Coordinate System
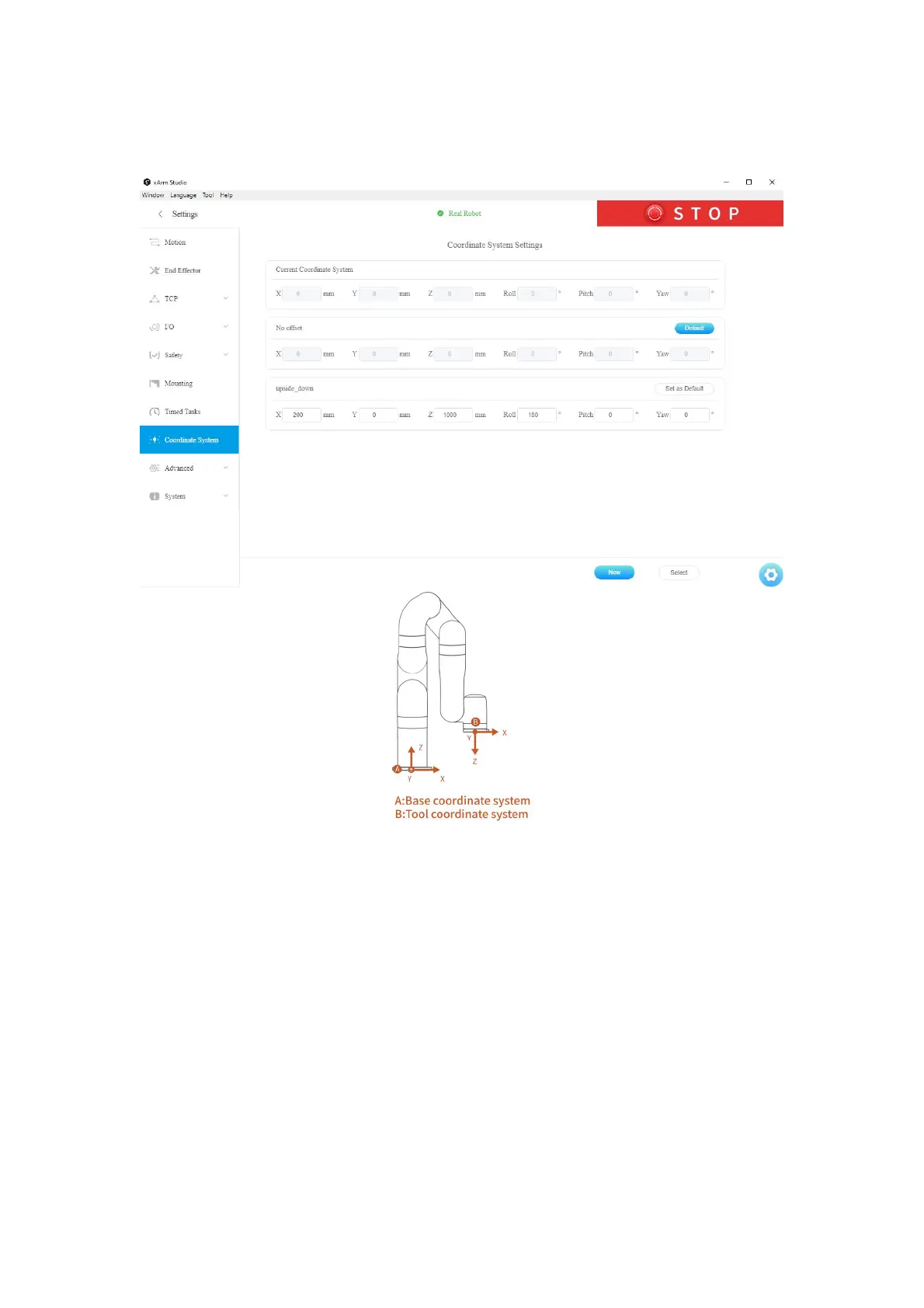
In this interface, the user can set the coordinate offset to customize the user coordinate
system. X, Y, Z are coordinate values that are offset relative to the base coordinate
system. Roll, Pitch, Yaw represents the angular values of orientation relative to the
base coordinate system. After this offset setting, user coordinate system becomes the
world origin instead of robot base.
【New】: Create a new user coordinate offset.
【Select】: Select the data to be deleted.
【Set as Default】: Set the offset data as the default offset.
 Loading...
Loading...





