12
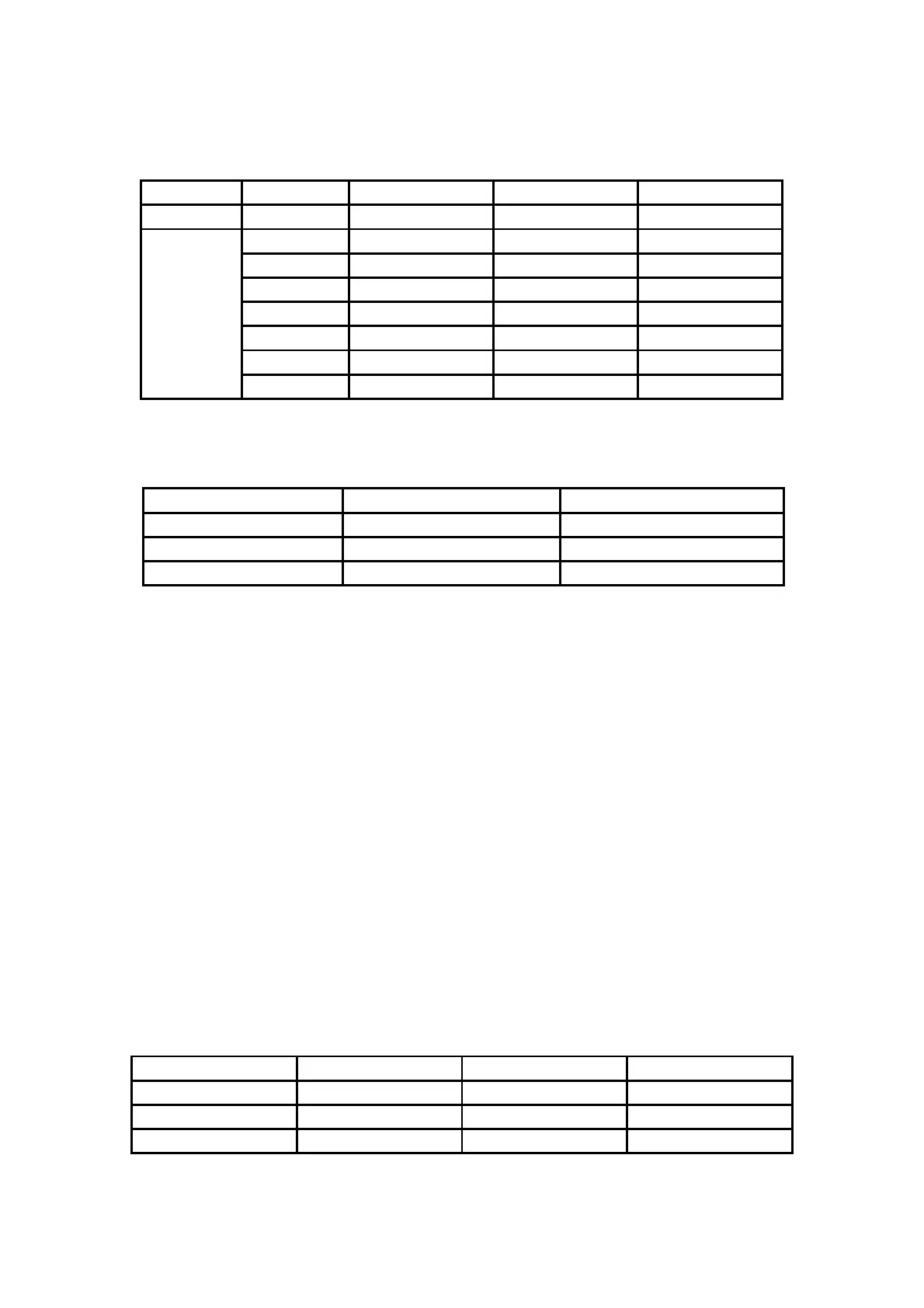
Table 1.1 working range of each joint of the robotic arm
Table 1.2 range of various motion parameters of the robotic arm
Note:
1. In the TCP motion (Cartesian space motion) commands (set_position () function of the SDK), If
a motion command involves both position transformation and attitude transformation, the attitude
rotation speed is generally calculated automatically by the system. In this situation, the specified
speed parameter is the maximum linear speed, range from: 0 ~ 1000mm / s.
2. When the expected TCP motion only changes the attitude (roll, pitch, yaw), with position (x, y,
z) remains unchanged, the specified speed is the attitude rotation speed, so the range 0 to 1000
corresponds to 0 to 180 ° / s.
Unit Definition
The Python / Blockly examples and the units standard in the communication protocol
are shown in Table 1.3.
Table 1.3. Default units in Python / Blockly example and Communication Protocol