88
1.4.9 Advanced Settings
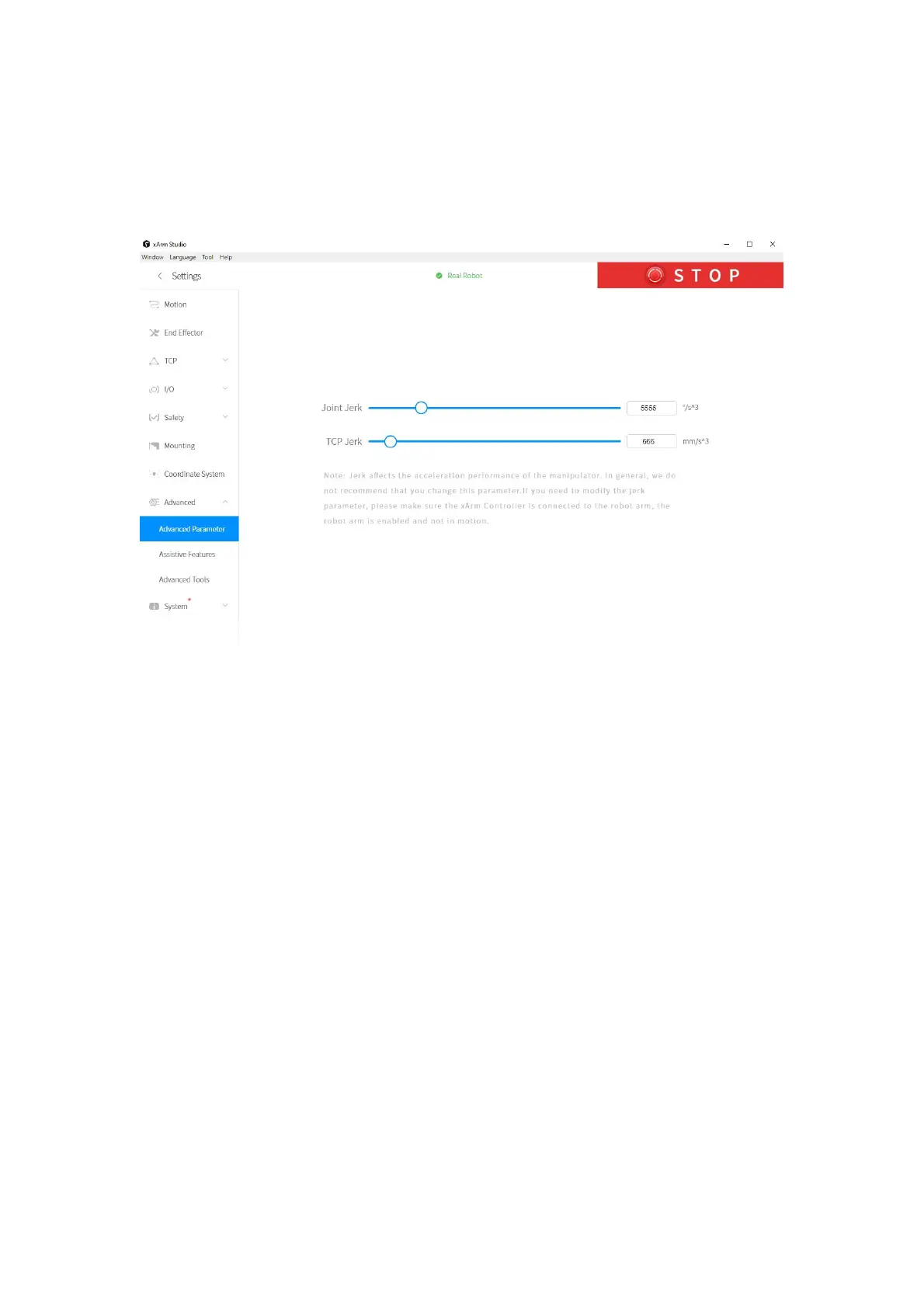
1.4.9.1. Advanced Parameters
If you want to modify the joint jerk and TCP jerk of the robotic arm, you can modify
time here.
Note:
1. The jerk affects the acceleration performance of the robotic arm. In general, we do
not recommend modifying this parameter.
2. If the robotic arm is not enabled, the jerk cannot be modified.
3. If an error warning occurs on the robotic arm, the jerk cannot be modified.
4. When the robotic arm is moving, the jerk can not be modified.

 Loading...
Loading...



