72
coincides with the centre point of the tool output flange.
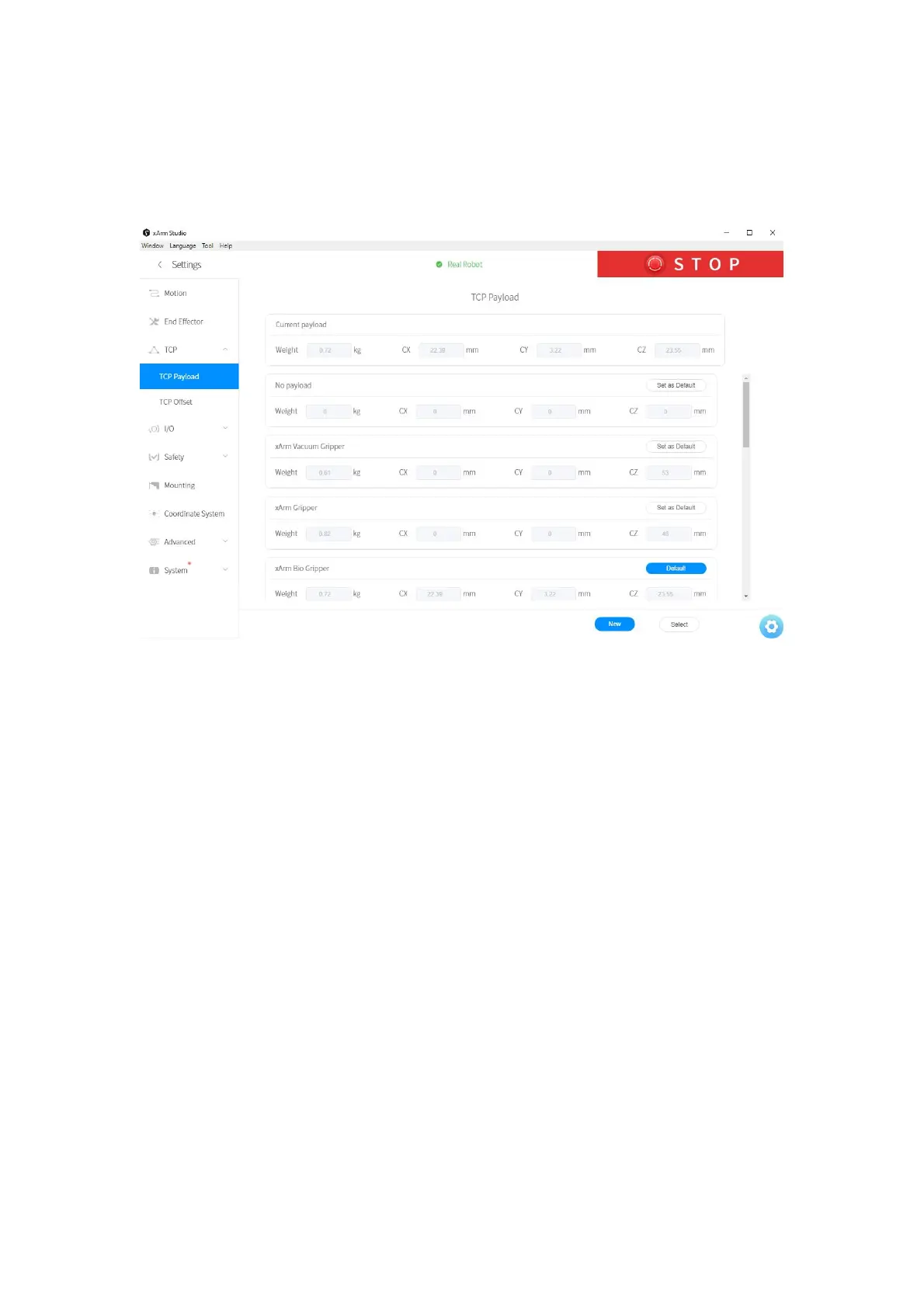
1.4.3.1 TCP Payload
On this page, the current payload of the robotic arm can be set and the additional TCP
payload data can be recorded. The additional TCP payload data can be referenced
during Blockly programming.
【Set as default】
● Set the payload data to the payload of the current robotic arm and display the
current payload at the top, which is used for controlling the entire robotic arm and
is related to the normal use of manual mode and collision detection.
【New】: Create new payload data.
【Select】: Select the payload data to be deleted in the next step.
【Delete】: Delete the selected payload data. Note: the current default payload data
cannot be deleted.
 Loading...
Loading...





