Descriptions of VACON® option boards vacon • 67
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
3
OPTBB board parameters
OPTBB board monitoring values
OPTBB board information pages
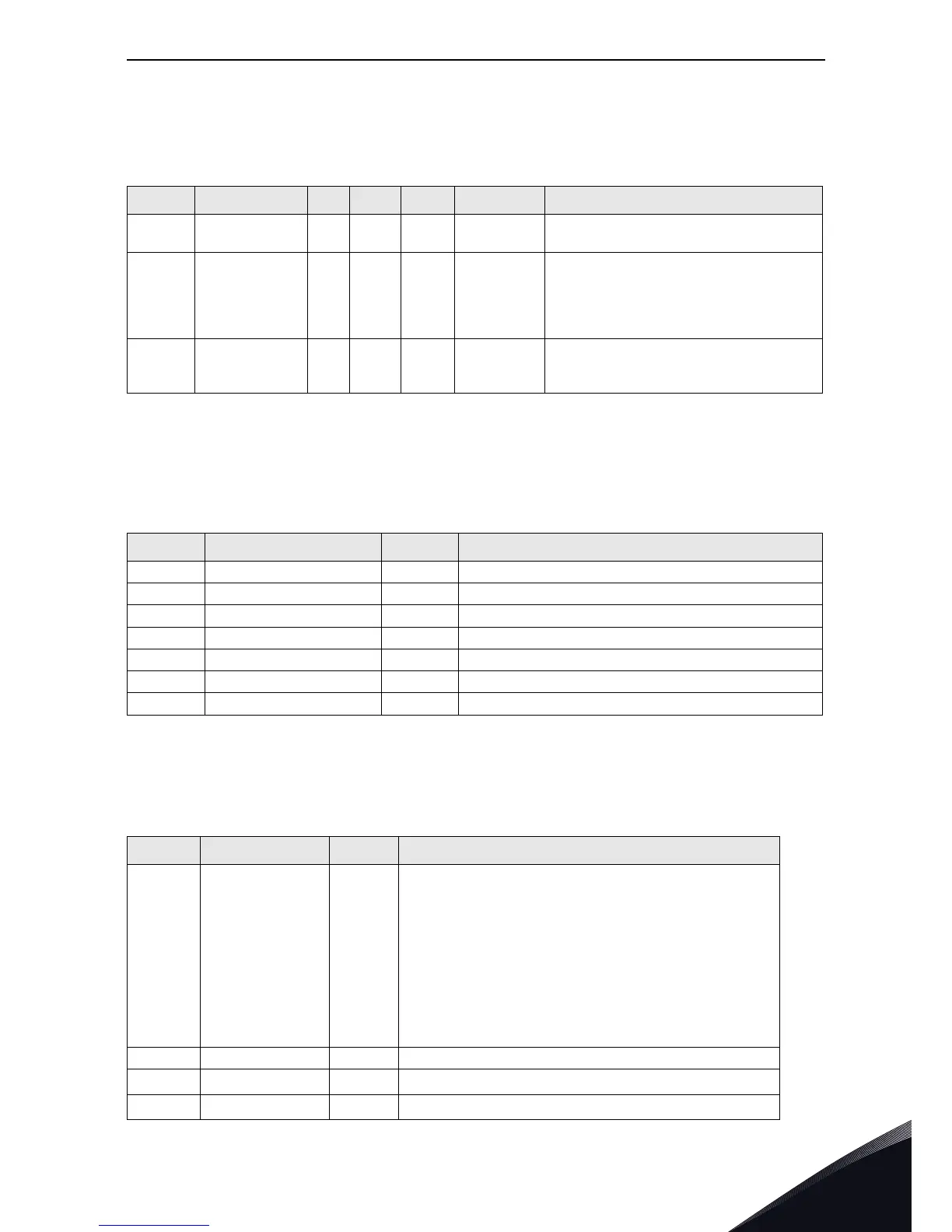
Table 33. OPTBB board parameters
Code Parameter Min Max Default Selections Description
7.3.1.1 Reverse 0 1 0
0 = No
1 = Yes
Manually selectable rotation direction
7.3.1.2 Reading rate 0 4 1
0 = Not used
1 = 1 ms
2 = 5 ms
3 = 10 ms
4 = 50 ms
Incremental pulse reading rate.
NOTE: Use value 1 in Closed Loop mode.
7.3.1.3 Interpolation 0 1 0
0 = No
1 = Yes
If activated, the sinusoidal incremental pulses
are used to calculate the polar angle in order
to optimize the encoder accuracy
Table 34. OPTBB board monitoring values
Code Monitored value Unit Description
7.3.2.1 Encoder frequence Hz Motor speed in Hz calculated from encoder pulses
7.3.2.2 Encoder speed rpm Motor speed in rpm calculated from encoder pulses
7.3.2.3 Encoder position - Absolute position of encoder read from Endat
7.3.2.4 Encoder revolution
7.3.2.5 Encoder fault
7.3.2.6 Encoder warning
7.3.2.7 Encoder messages Number of messages between encoder and NXOPTBB
Table 35. OPTBB board information pages
Code Information Unit Description
7.3.3.1 Encoder type
0 = No encoder connected
1—4 = Incremental linear encoder
5 = Linear absolute encoder
6 = Unknown
7 = Linear absolute encoder
8 = Unknown
9—12 = Rotational incremental/angular encoder
13 = Absolute encoder (singleturn)
14 = Unknown
15 = Absolute encoder (multiturn)
16 = Unknown
7.3.3.2 Pulses/Revolution Sinusoidal pulses/revolution
7.3.3.3 Position bits bit
Accurate position 1—1024 (10bit = 2
10
= 1024)
7.3.3.4 Revolution bits bit
Accurate number of revolutions 1—1024 (10bit = 2
10
= 1024)
 Loading...
Loading...














