13-4
13
TROUBLESHOOTING
13-2 Alarm and Countermeasures
13-2-2
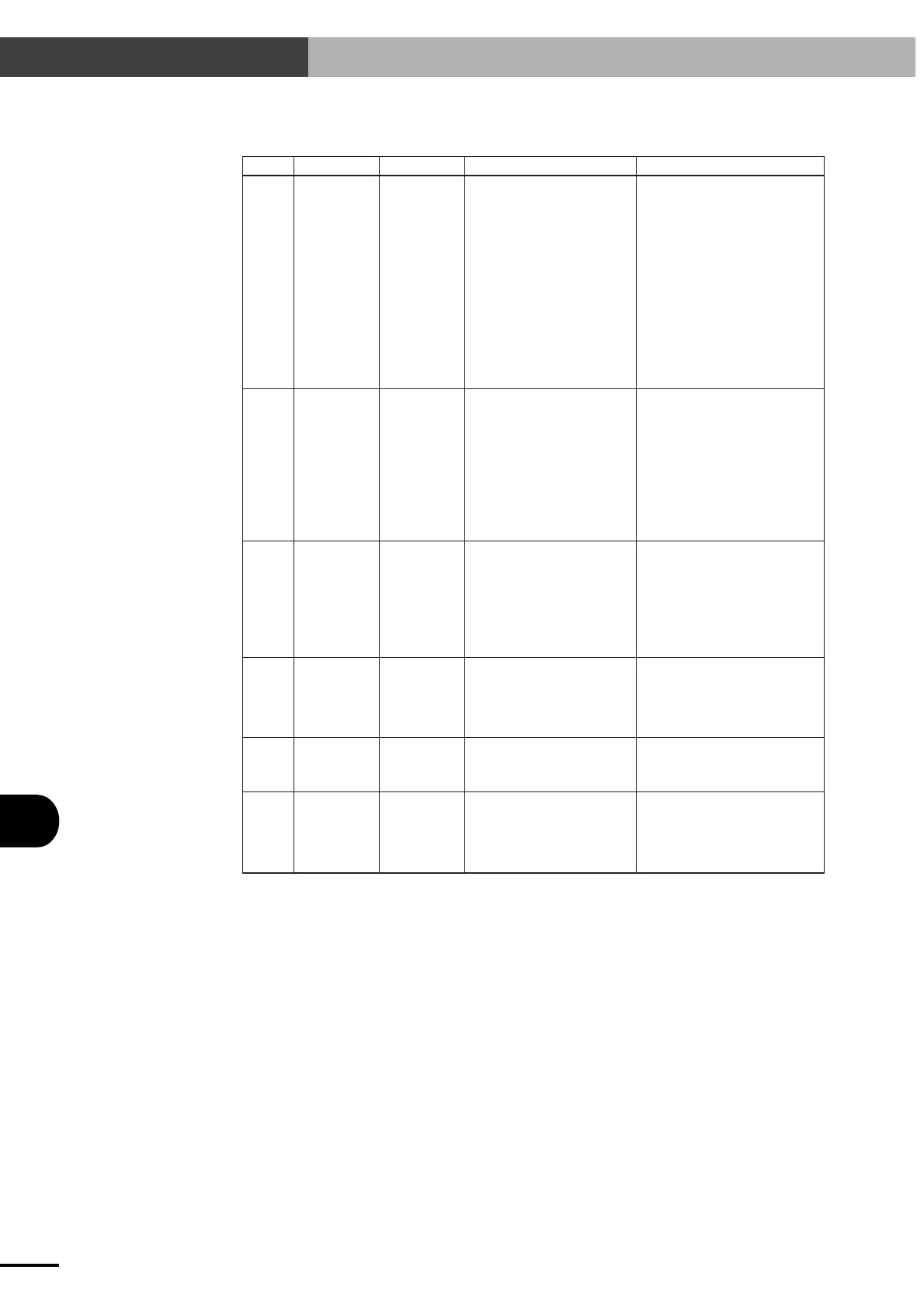
Alarm message list
Action
Lower the operation duty on the robot
or reduce the acceleration parameter,
or correct the payload parameter.
If the motor armature resistance is
too low or the motor movement is
sluggish when turned by hand, then
replace the motor assembly.
Initialize the parameters and check
the robot type setting.
Supply 24V to the brake wire to
check whether the brake is released.
Check the power supply capacity. If
too low, use a power supply of larger
capacity.
Check whether the robot moving parts
work sluggishly. If sluggish, then
adjust the mechanical alignment.
Check the motor wires for electrical
continuity, and replace the motor
assembly if abnormality is found.
Replace the motor if internally
shorted.
If the resistance between motor
terminals U and V, U and W, or V
and W is lower than 100 ohms, the
output transistor is defective, so
replace the ERCX controller.
Initialize the parameters and check
the robot type setting.
Correct the ambient environmental
conditions.
(Install a cooling fan.)
Lower the operation duty on the
robot.
If the controller is being used
correctly, the transistor is probably
defective, so replace the ERCX
controller.
Check the power supply capacity. If
insufficient, use a power supply
having larger capacity. (Power is
consumed mostly during return-to-
origin of stroke end detection, robot
start-up and acceleration/deceleration.)
Replace the battery. (If not
possible to replace it immediately,
then temporarily set bit 3 of
PRM34 to "1".)
Check the 24V power supply.
Check for short-circuit using a multi-
meter or recheck the I/O connections.
Alarm No.
01
02
03
04
05
06
Alarm Message
OVER LOAD
OVER
CURRENT
OVER HEAT
POWER
DOWN
BATT.LOW-
VOLTAGE
24V POWER
OFF
Meaning
Excessive load
on motor
Motor drawing
too much current
Transistor has
heated to 90°C or
more.
Power supply
voltage has
dropped to less
than 70% of rated
value.
System backup
battery voltage is
low
24V power is not
supplied.
Possible Cause
Improper operation
Motor failure
Parameter error
Electromagnetic brake failure or
wire broken
Insufficient power supply capacity
Excessive friction in robot
Motor wire shorted
Motor failure
Controller failure
Parameter error
Rise in ambient temperature
(above 40°C)
Excessive load on motor
Defective transistor
Insufficient power supply capacity
Battery worn out.
Battery failure
24V power supply is not
connected to A13 and B13 of the
I/O connector.
Fuse has blown due to short-
circuit or excessive current flow
in the 24V circuit.
q
w
e
r
t
y
q
w
e
r
q
w
e
q
qw
q
w
q
w
e
r
t
y
q
w
e
r
q
w
e
q
q
w
q
w

 Loading...
Loading...








