9-2
9
OPERATING THE ROBOT
9-1 Performing Return-to-Origin
9-1 Performing Return-to-Origin
There are two methods for detecting the origin position (reference point): search method and mark
method. The search method is further divided into the origin sensor method and stroke-end detection
method. In the mark method, you can move the robot to a desired position (mark position) and set it
as the particular coordinate position to determine a reference point.
The following sections explain how to perform return-to-origin by using the search method and mark
method.
Once return-to-origin is performed after the robot cable and absolute battery are connected, there is
no need to repeat it even when the controller is turned off. (As an exception, return-to-origin becomes
incomplete if the absolute backup function is disabled or a parameter relating to the origin is changed.
Return-to-origin must be reperformed in that case.)
9-1-1 Return-to-origin by the search method
When the search method is selected as the origin detection method (PRM13=0 or 1), perform return-
to-origin with the procedure below.
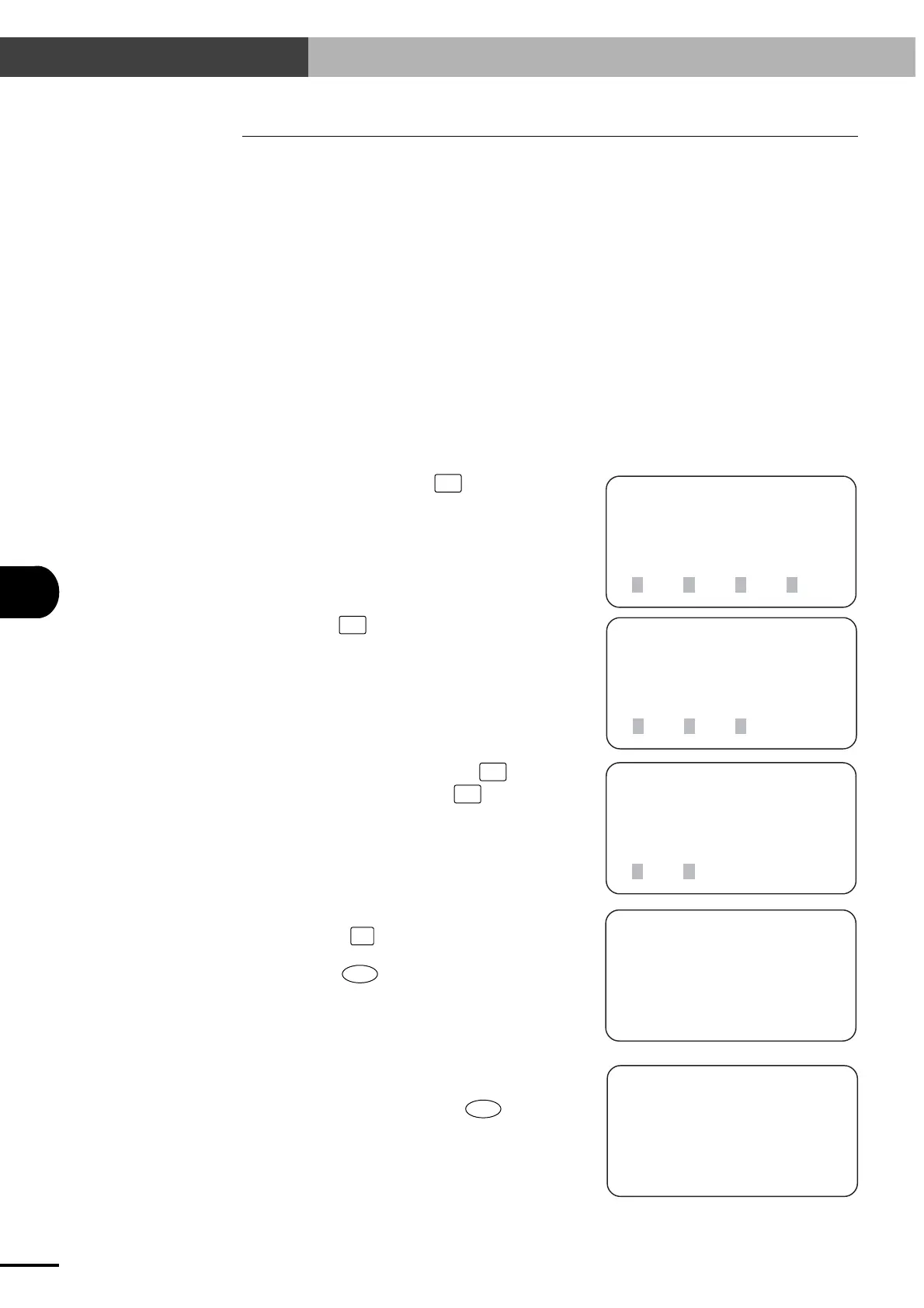
1) On the initial screen, press
F2
(OPRT).
[MENU]
select menu
1EDIT2OPRT3SYS 4MON
[OPRT]
select menu
1ORG 2STEP3AUTO
[OPRT-ORG-SEARCH]
ORG search OK ?
1yes 2no
[OPRT-ORG-SEARCH]
searching ...
2) Next, press
F1
(ORG).
3) To perform return-to-origin, press
F1
(yes).
To cancel the operation, press
F2
(no).
4) This screen is displayed during return-to-ori-
gin. Pressing
STOP
during the operation brings
the robot to a halt and displays a message. Then,
pressing the
ESC
key returns to the screen of
step 2.
5) When return-to-origin is completed normally,
the machine reference appears on the lower
right of the screen. Pressing the
ESC
key re-
turns to the screen of step 2.
[OPRT-ORG-SEARCH]
origin complete
machine ref. 50%
 Loading...
Loading...









