8-33
8
ROBOT LANGUAGE
8-5 Sample Programs
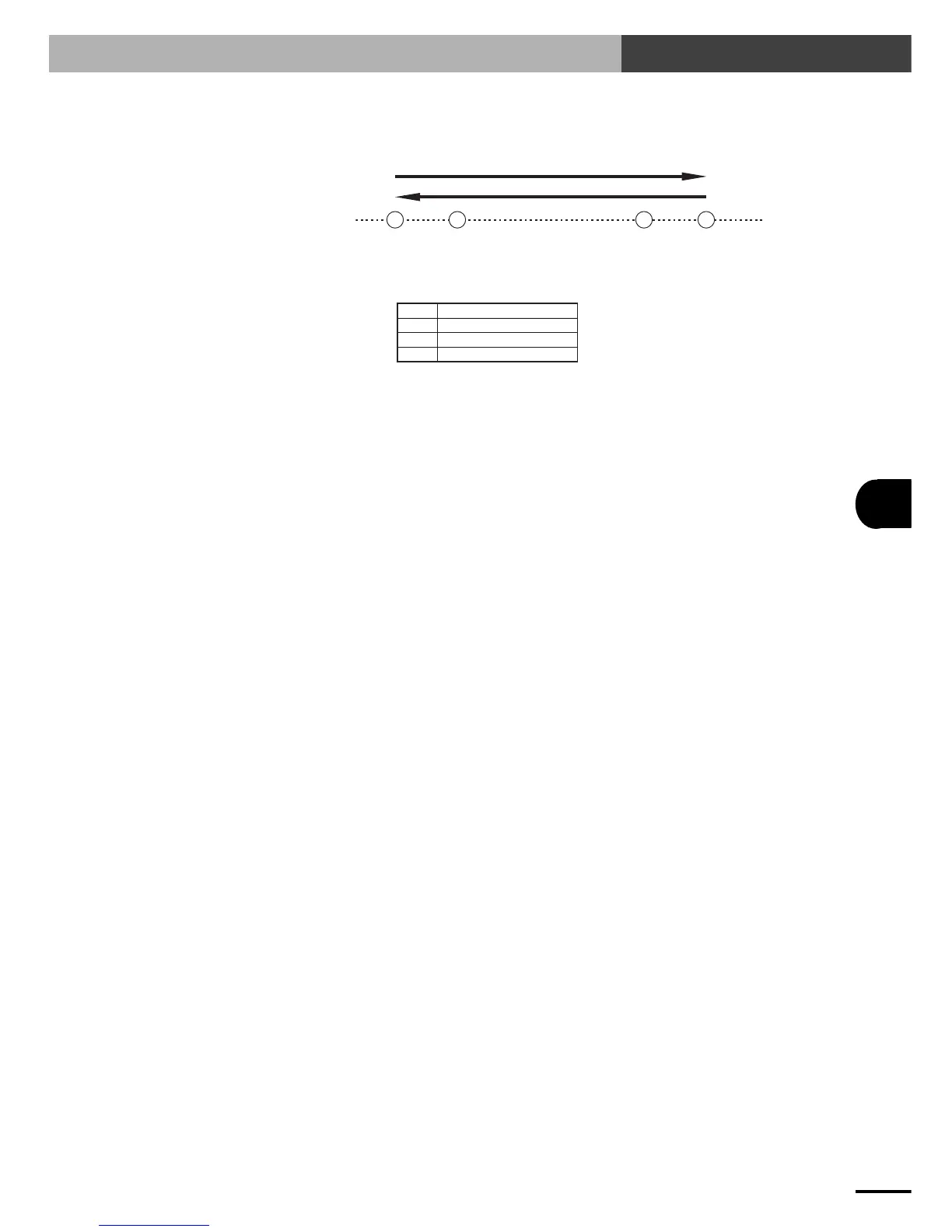
8-5-9 Turning ON a general-purpose output during robot
movement when it has passed a specified position
Point
P0 Start position
P1 Target position
P10 Position at DO0=1
P11 Position at DO0=0
P0 P1
DO0=1
P10 P11
DO0=0
■ When P1 is nearer to the plus side than P0:
Program Comment
[NO0]
001: L 0 ; Label definition
002: MOVA 0, 100 ; Moves to P0 at speed 100
003: TON 1, 1, 0 ; Starts program NO1 as task 1
004: MOVA 1, 10 ; Moves to P1 at speed 10
005: JMP 0, 0 ; Returns to L0
Program Comment
[NO1]
001: DO 0, 0 ; Turns DO0 off
002: P 10 ; Sets the point variable to 10
003: L 0 ; Label definition
004: JMPP 0, 1 ; Jumps to L0 when the robot does not reach P10
005: DO 0, 1 ; Turns DO0 on
006: P 11 ; Sets the point variable to 11
007: L 1 ; Label definition
008: JMPP 1, 1 ; Jumps to L1 when the robot does not reach P11
009: DO 0, 0 ; Turns DO0 off