2-7
2
INSTALLATION AND CONNECTION
2-6 Connecting to the I/O. CN Connector
2-6 Connecting to the I/O. CN Connector
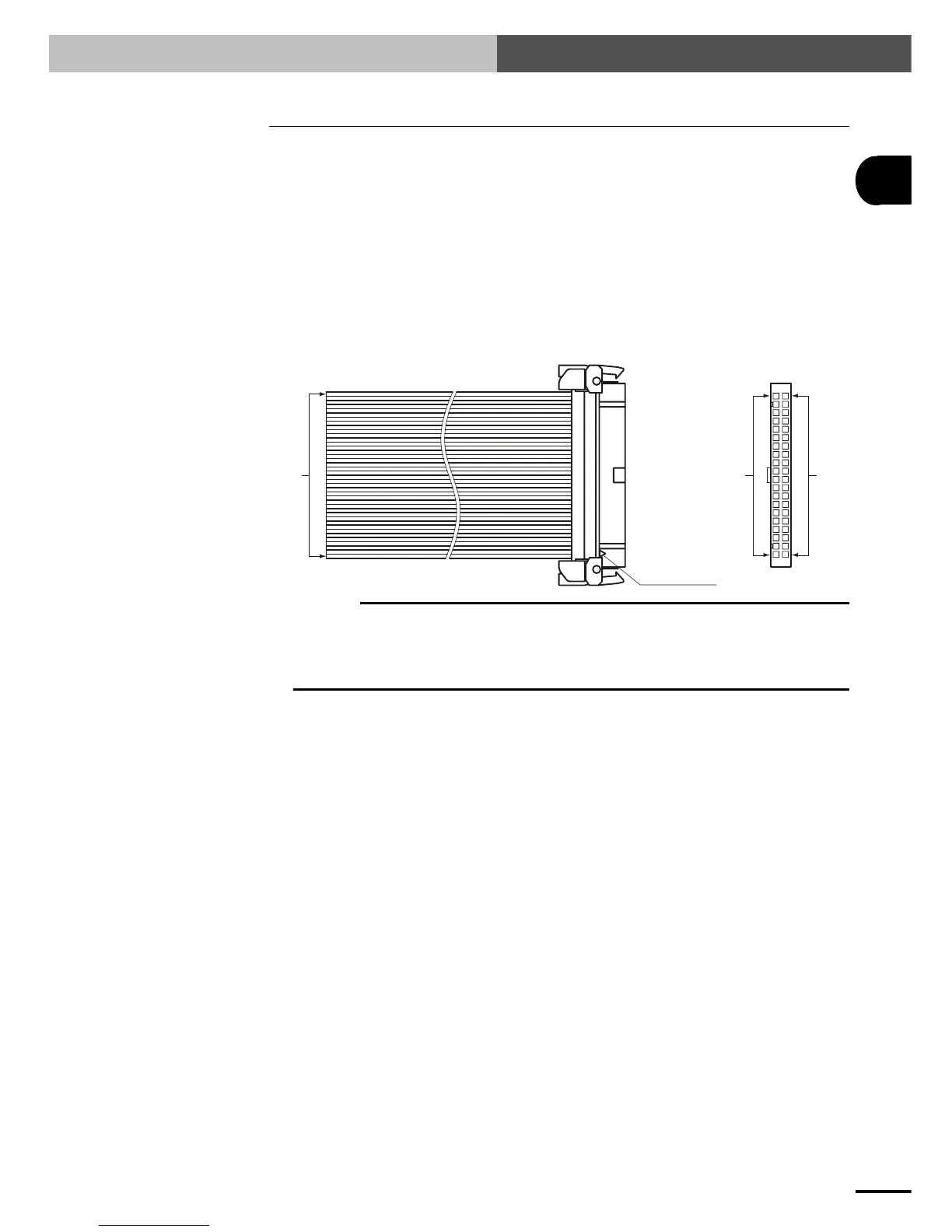
The I/O. CN connector is used for connecting the SRCP controller to external equipment such as a
PLC. When using external equipment for I/O control, connect the wiring to the I/O. CN connector
(with a flat cable) supplied as an accessory and then plug it into the I/O. CN connector on the SRCP
controller.
Signals assigned to the I/O. CN connector terminals and their functions are described in detail in
Chapter 3.
The mating connector with a flat cable (option) for the I/O. CN terminal on the SRCP series control-
ler is as follows:
Mating connector type No. : XG4M-4030-U (OMRON)
SRCP's I/O. CN connector type No. : XG4C-4034
A20
A19
A18
A17
A16
A15
.
.
.
.
.
.
.
.
.
A6
A5
A4
A3
A2
A1
B20
B19
B18
B17
B16
B15
.
.
.
.
.
.
.
.
.
B6
B5
B4
B3
B2
B1
Triangular mark
B20
A20
B19
A19
B18
A18
.
.
.
.
.
.
.
.
.
B3
A3
B2
A2
B1
A1
c
CAUTION
Regardless of whether I/O control is used or not, DC 24V power must be supplied to EXT. CN to enable robot
operation. If no power is supplied to EXT. CN, an alarm (06: 24V POWER OFF) is issued to prevent operation.
(See "2.7 Connecting to the EXT. CN Connector" in this chapter.)
If not using I/O control, disable the interlock function in PRM34 (System mode selection parameter). If the
interlock function is not disabled, it will be triggered during operation to prohibit the robot from operating.