8-16
ROBOT LANGUAGE
8-4 Robot Language Description
8
8-4-20
JMPP
Function: Jumps to a specified label when the axis position relation meets the speci-
fied conditions.
Format: JMPP <label number>, <axis position condition>
Example: JMPP 3,1
Jumps to label 3 if the X-axis position is smaller than the point specified
with the point variable P.
Explanation: This command controls the program flow according to the specified po-
sition of the axis, by comparing it with the point specified with the point
variable P.
(1) Label number
The label number is a number defined by the "L" statement, and
indicates the destination to jump. Any number from 0 to 255 can be
specified. (See "8-4-7 L".)
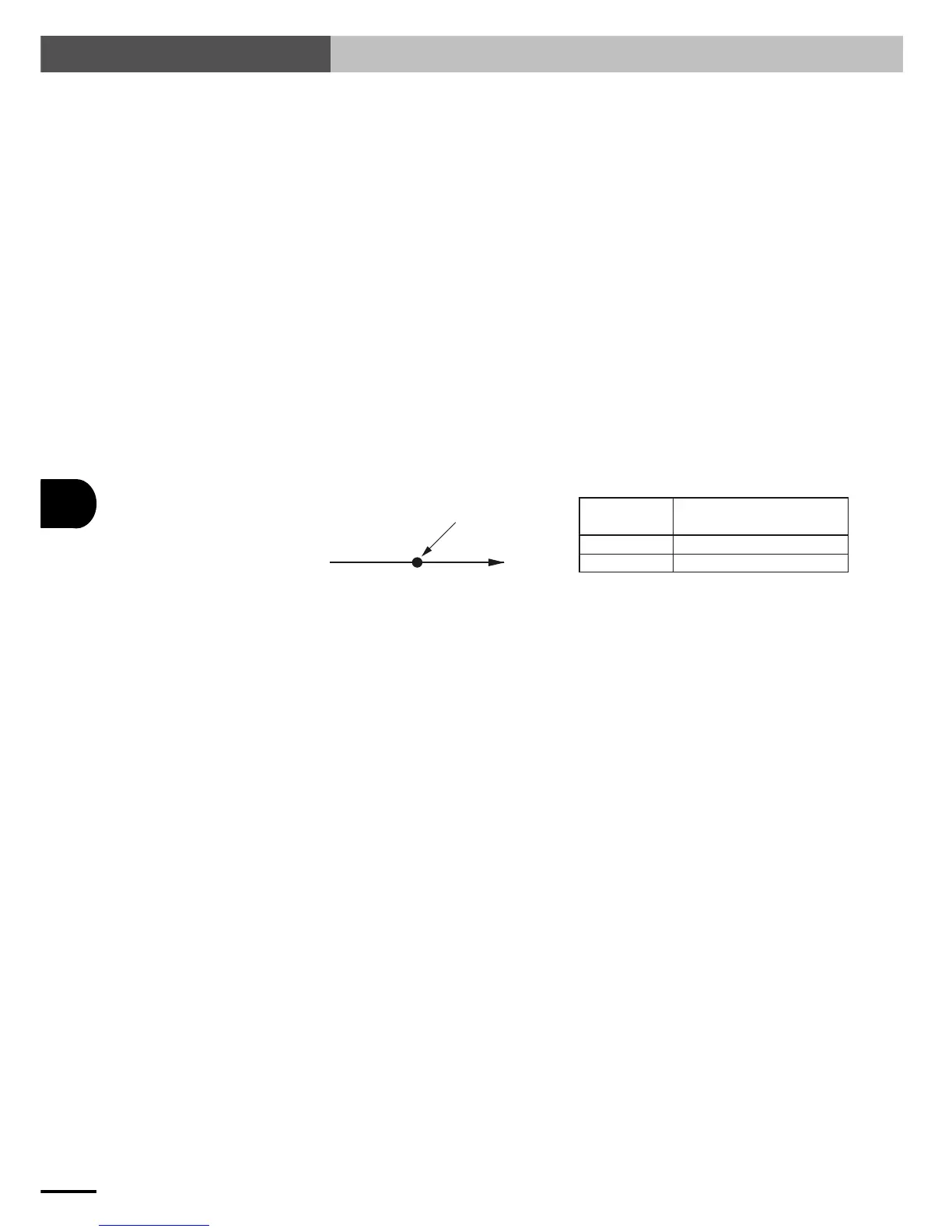
(2) Axis position condition
When set to 1, this establishes the condition that the robot must be
closer to the origin than the specified position. When set to 2, this
establishes the condition that the robot must be farther away from
the origin than the specified position.
Others: • When the axis is at the specified coordinate position, this views that
the condition is met.
Axis position
condition
1
2
Robot position that meets the
condition
Robot is in area A.
Robot is in area B.
Point specified with
point variable P
X
A B
Origin