2.2.3 The principle of write () function
In the program, we use the write() function to control the rotation of the servo.
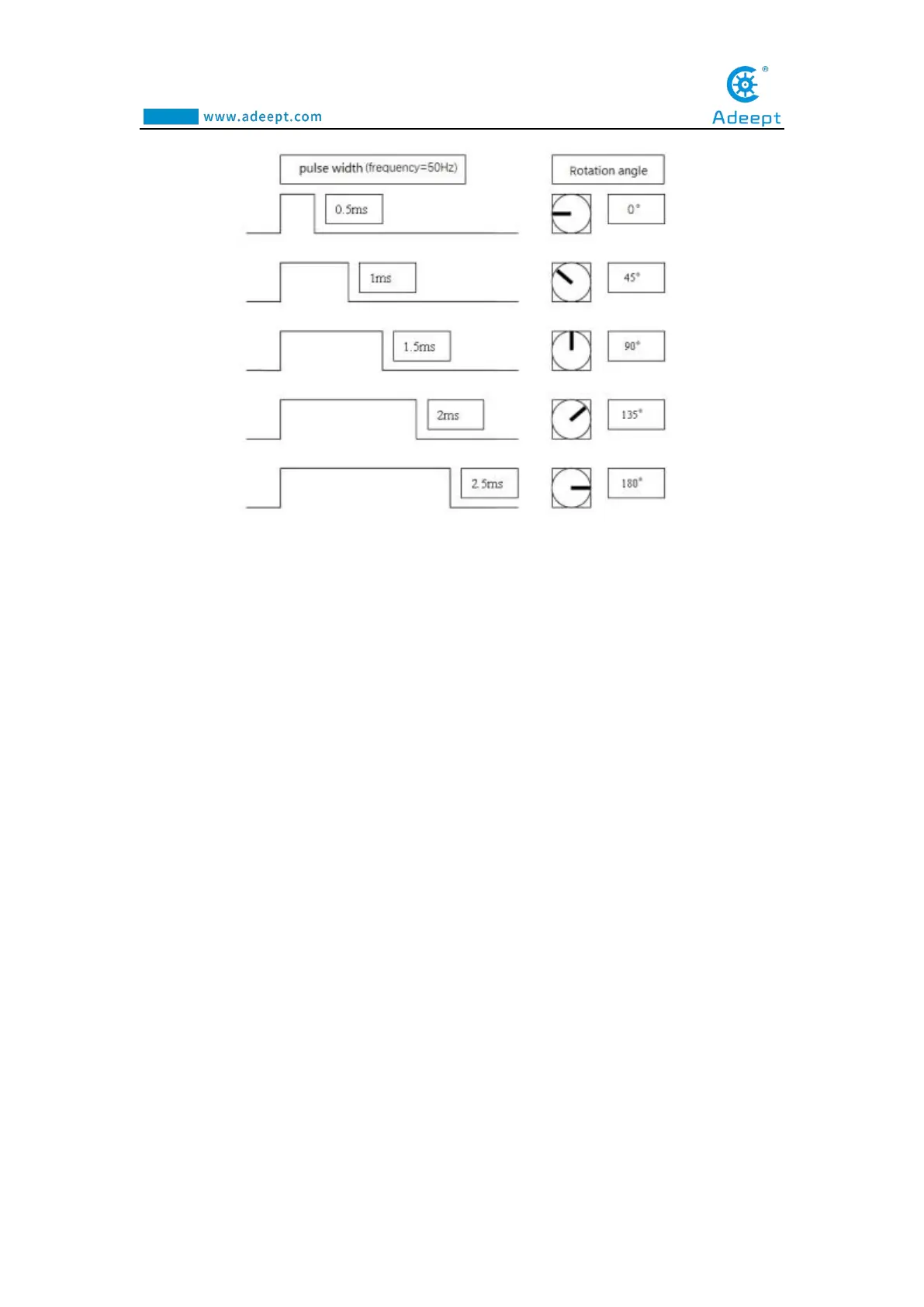
For standard servos, the write() function will rotate the servo axis to the
corresponding angular position. For the continuous rotation type of servo, the write()
function can set the rotation speed of the servo (0 indicates that the servo rotates at
full speed in one direction, 180 indicates that the servo rotates at full speed in another
direction, and 90 indicates that the servo is stationary. The servo which is used this
time is a standard servo.