34 Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016
Chapter 2 Configure a Cartesian Coordinate System
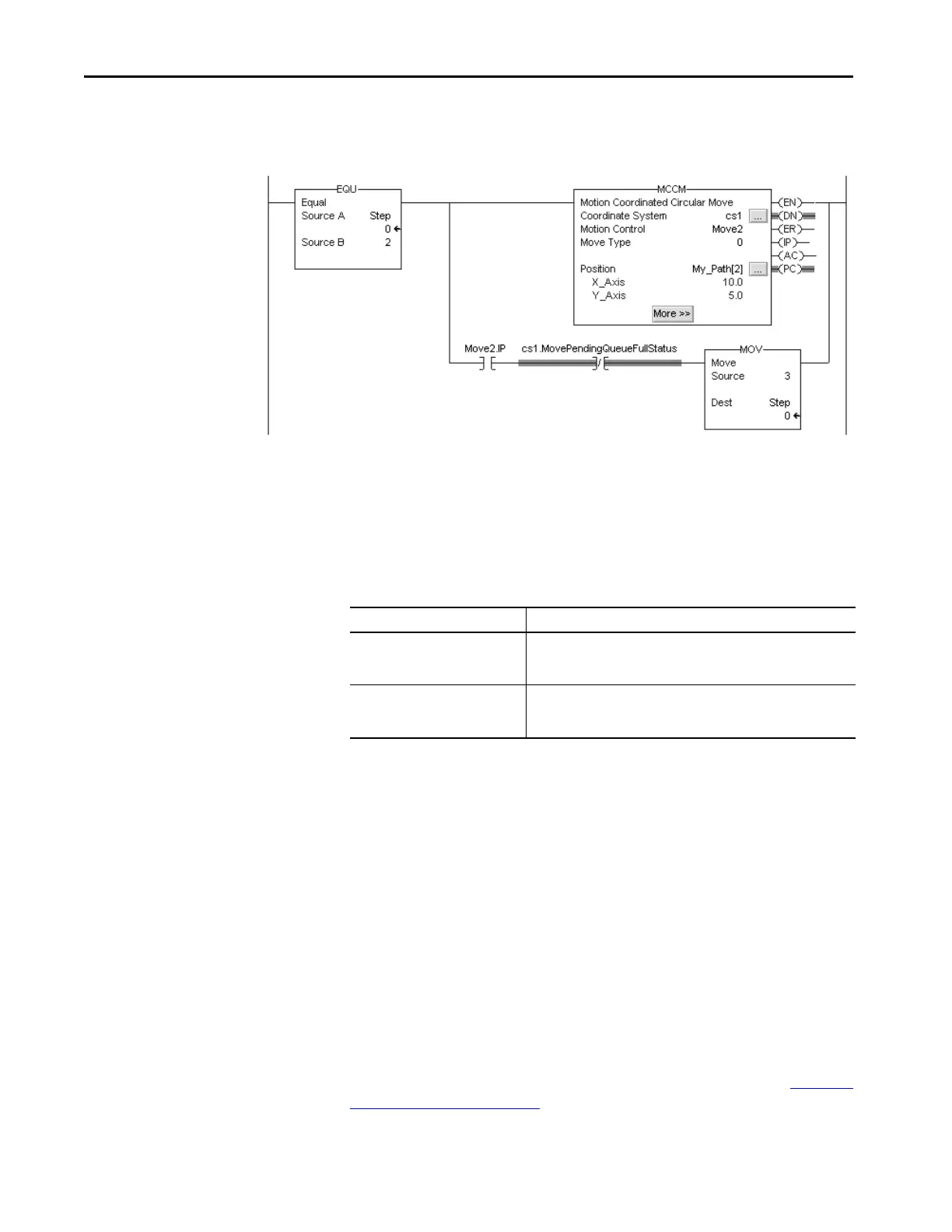
And once Move2 is in process and there is room in the queue:
Step = 3.
When an instruction completes, it is removed from the queue and there is
space for another instruction to enter the queue. Both bits always have the same
value because you can queue only one pending instruction at a time. If the
application requires several instructions to be executed in sequence, then the
bits are set by using these parameters.
The termination type operand for the MCLM or MCCM instruction specifies
how the currently executing move gets terminated. These illustrations show the
states of instruction bits and coordinate system bits that get affected at various
transition points (TP).
The termination types are:
•0 - Actual tolerance
•1 - No Settle
• 2 - Command Tolerance
• 3 - No Decel
• 4 - Follow Contour Velocity Constrained
• 5 - Follow Contour Velocity Unconstrained
• 6 - Command Tolerance Programmed
For further information on how to select a termination type, refer to Choose a
Te r m i n a t i o n Ty p e on page 39.
Table 9 - Bit Parameters
When Then
One instruction is active and a second
instruction is pending in the queue
• MovePendingStatus bit = 1
• MovePendingQueueFullStatus bit = 1
• You cannot queue another instruction
An active instruction completes and
leaves the queue
• MovePendingStatus bit = 0
• MovePendingQueueFullStatus bit = 0
• You can queue another instruction

 Loading...
Loading...





