Rockwell Automation Publication 2198-UM002G-EN-P - February 2019 115
Connector Data and Feature Descriptions Chapter 4
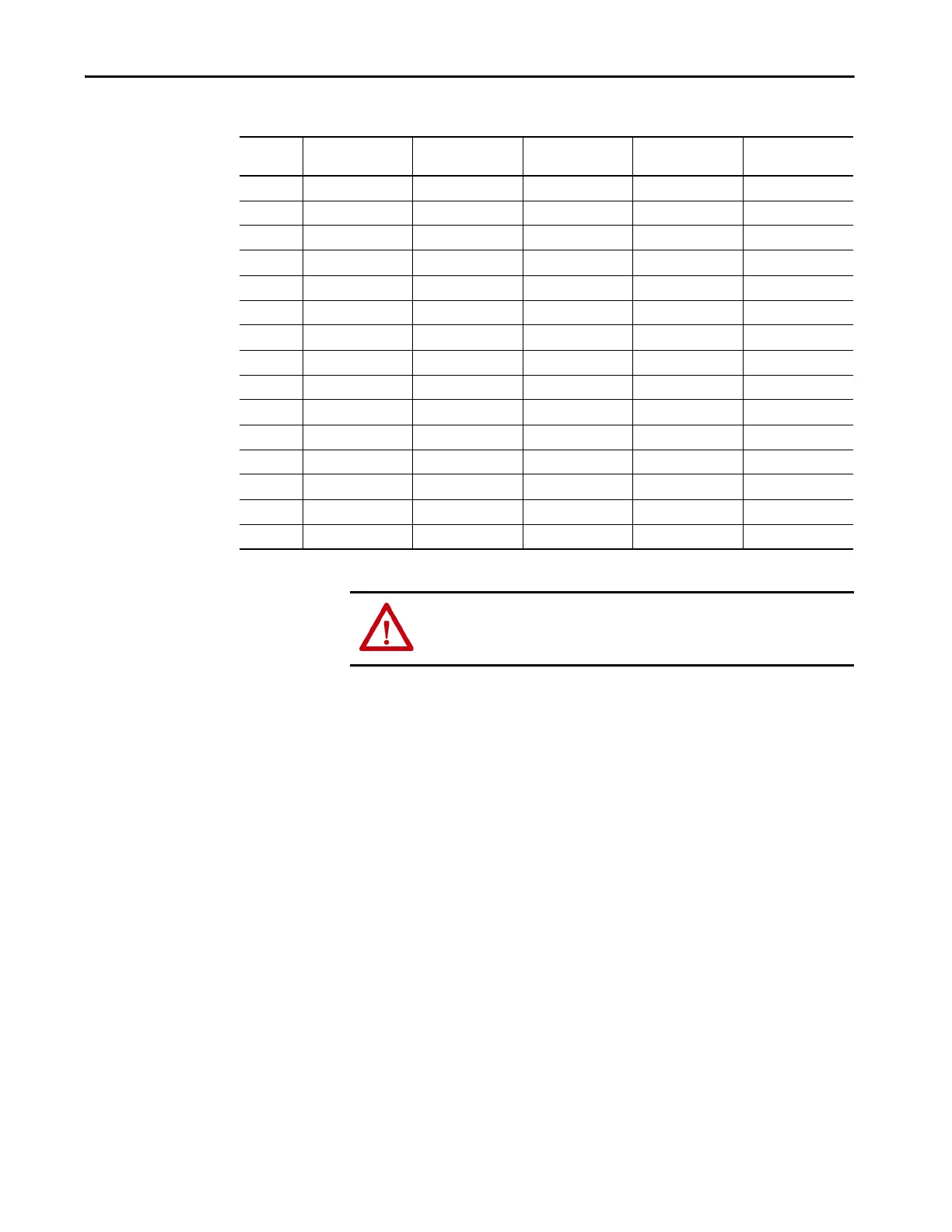
Table 52 - Universal Feedback Signals by Device Type
UFB Pin
Stegmann
Hiperface
Generic TTL
Incremental
Generic Sine/Cosine
Incremental
Heidenhain
EnDat Sine/Cosine
Heidenhain
EnDat Digital
1 MTR_SIN+ MTR_AM+ MTR_SIN+ ENDAT_B+ –
2 MTR_SIN– MTR_AM– MTR_SIN– ENDAT_B– –
3 MTR_COS+ MTR_BM+ MTR_COS+ ENDAT_A+ –
4 MTR_COS– MTR_BM– MTR_COS– ENDAT_A– –
5 MTR_DATA+ MTR_IM+ MTR_IM+ MTR_DATA+ MTR_DATA+
6 MTR_ECOM MTR_ECOM MTR_ECOM MTR_ECOM MTR_ECOM
7MTR_EPWR9V
(1)
– – MTR_EPWR9V
(1)
MTR_EPWR9V
(1)
8 – MTR_S3 MTR_S3 – –
9 – – – MTR_CLK+ MTR_CLK+
10 MTR_DATA– MTR_IM– MTR_IM– MTR_DATA– MTR_DATA–
11 MTR_TS MTR_TS MTR_TS MTR_TS MTR_TS
12 – MTR_S1 MTR_S1 – –
13 – MTR_S2 MTR_S2 – –
14 MTR_EPWR5V
(1)
MTR_EPWR5V MTR_EPWR5V MTR_EPWR5V
(1)
MTR_EPWR5V
(1)
15 – – – MTR_CLK– MTR_CLK–
(1) Determine which power supply your encoder requires and connect to only the specified supply. Do not make connections to both supplies.
ATTENTION: To avoid damage to components, determine which power
supply your encoder requires and connect to either the 5V or 9V supply, but
not both.
 Loading...
Loading...








