STbench EN Operation
© Atlas Copco Industrial Technique AB - 9839 0880 01
37
■
Serial cable (only for Serial connection) / Ethernet cable (only for Ethernet connection)
■
Hydraulic brakes or SRTT-B / IRTT-B / QRTT-B connected to a mechanical joint simulator
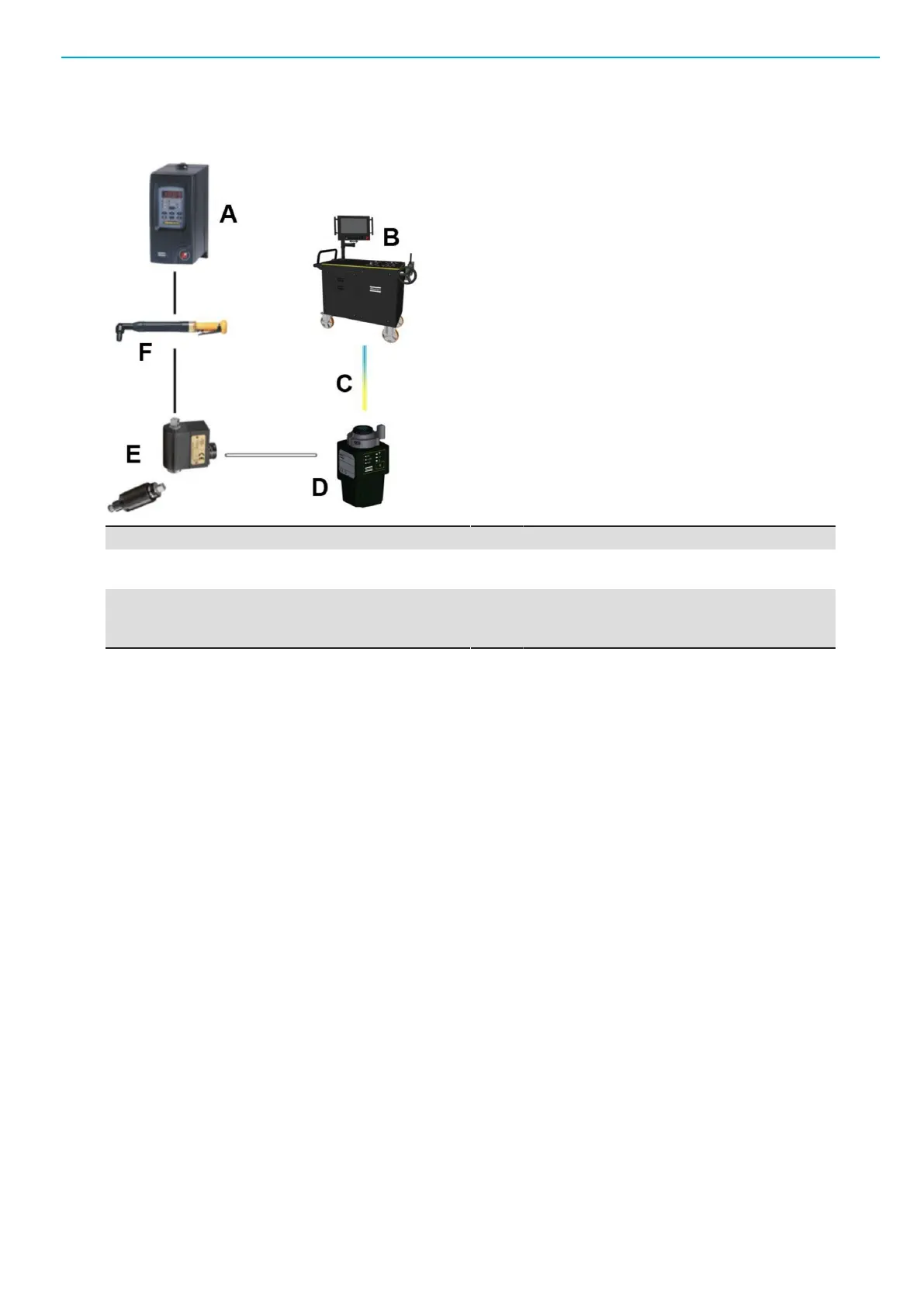
A Generic controller B STbench with PC
C Connection between the STbench with PC
and IRC-Connect
D IRC-Connect
E Hydraulic brakes or transducers (IRTT-B,
SRTT-B, QRTT-B) + existing application or
mechanical joint simulator or
F Power tool
The transducer capacity and the mechanical joint simulator capacity must be compatible with the torque
that calibrates the tightening tool.
The possible configurations for the calibration are the following:
■
The tool connected to generic controller operates directly with the hydraulic brakes of the STbench.
■
The tool connected to generic controller operates with the transducer (+existing application or me-
chanical joint simulator), connected to the STbench via cable.
■
The tool connected to generic controller operates with the transducer (+existing application or me-
chanical joint simulator), connected to the IRC-Connect via cable. The IRC-Connect is connected to
STbench via IRC-B.
Articulated arm - General information
The Articulated Arm is a special tool that may feature the STbench in order to increase the operating
range of it. It allows positioning of the brake in case the tool location is located out of the action range of
the entire bench.
In this paragraph the technical specification and the procedure to install the Articulated arm to the
STbench are described.
 Loading...
Loading...
