Chapter 5: Communications
Page 5–17Stellar
®
SR55 Series Soft Starter User Manual – 1st Ed, Rev F – 09/18/2019
eTherneT/ip neTWork CommuniCaTions (ConTinued)
ConneCTing To The sr55-Cm-eneT module Through expliCiT message:
There are a few different objects that can be read or be written to via Explicit Messaging:
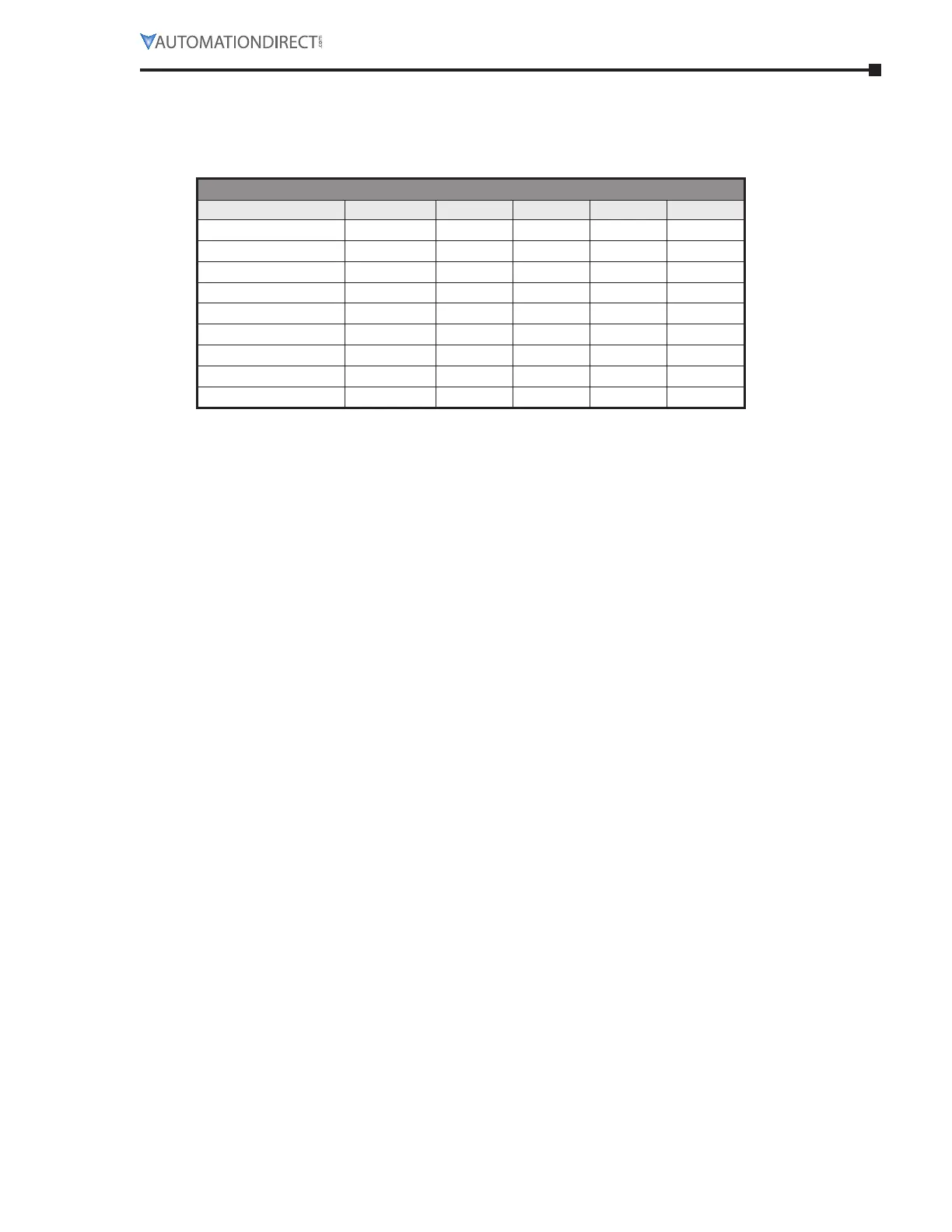
Objects Supported By Explicit Messaging
Description Read Only? Service Class Instance Attribute
Run No 16 (0x10) 41 (0x29) 1 3
Fault Reset No 16 (0x10) 41 (0x29) 1 12 (0x0c)
Network Control No 16 (0x10) 41 (0x29) 1 5
Faulted Yes 14 (0x0e) 41 (0x29) 1 10 (0x0a)
Warning Yes 14 (0x0e) 41 (0x29) 1 11 (0x0b)
Running Forward Yes 14 (0x0e) 41 (0x29) 1 7
Ready Yes 14 (0x0e) 41 (0x29) 1 9
Control from Network Yes 14 (0x0e) 41 (0x29) 1 15 (0x0f)
Drive State Yes 14 (0x0e) 41 (0x29) 1 6
With the exception of the “Drive State” parameter, all of the other parameters either require a
value of 1 or 0 for SET (16), and will return a value of 0 or 1 on the GET (14) parameters.
To run the starter, a value of 1 must be set in the “Network Control” parameter first and then a
value of 1 can be sent to the “Run” parameter to start the motor and a value of 0 to the same
parameter to stop the motor.
If the Communications Trip parameter is enabled, a message must be sent to the starter at
a faster rate than what is configured for the Timeout parameter. It is typical in this situation
to poll the “Faulted” parameter to view the state of the starter along with keeping the
Communications Trip from enabling and stopping the motor.
If communications are interrupted for a long enough period to invoke the Communications
Trip fault, the following sequence is required to restart the motor:
•
Send a 0 to the “Run” parameter.
•
Send a 1 to the “Fault Reset” parameter.
•
Send a 0 to the “Fault Reset” parameter.
•
Now you can restart the motor by sending a 1 to the “Run” parameter.

 Loading...
Loading...