58
5. Click Start Move .
In the dialog box that appears, click GO .
The motor will now attempt to rotate 0.2 revolutions. MCT will upload the recorded (captured) data from
the MintDrive and the Tuning Graph tab will be shown. Below the graph, make sure that only the
Actual Position and Demand Position boxes are checked.
Note:
The graph that you see on your system will not look exactly the same as the graph shown below!
Remember that each motor has a slightly different response.
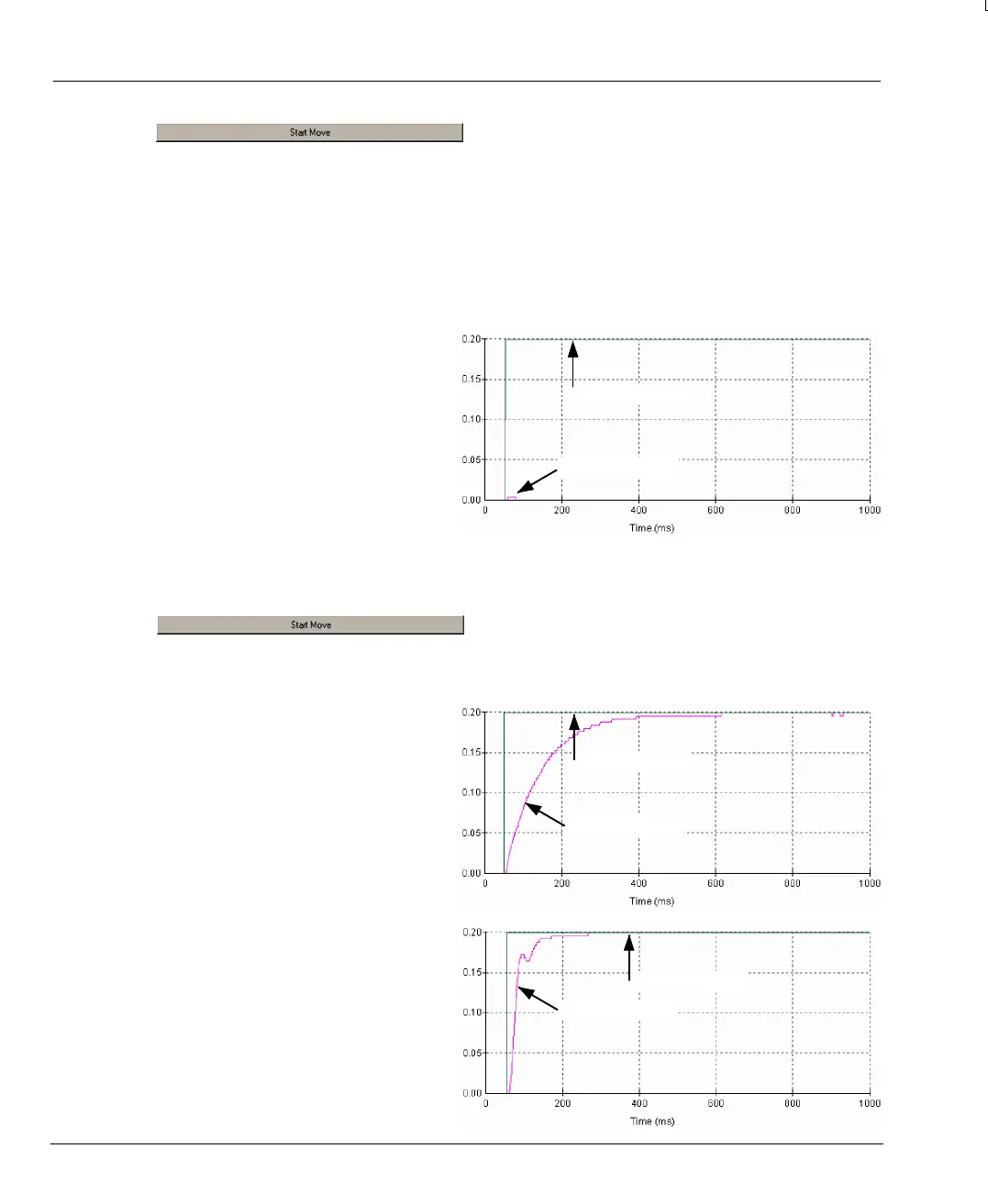
With only KVELFF defined, you will
get very little response.
The Proportional gain term,
KPROP, should be used to
overcome the large following
error...
6. Click the Position Loop Tuning tab, click the KPROP box and enter a small starting value, for example 1.
Click Start Move .
In the dialog box that appears, click GO .
Adding the KPROP term has
improved the response, but it is still
quite slow.
As the value of KPROP increases,
the rise (response) time will
decrease. For example, the plot
opposite shows the effect of setting
KPROP to a value of 3.
Demand position
Measured position
Measured position
Demand position
Measured position
Demand position