
R
Robert Hamilton MDSep 9, 2025
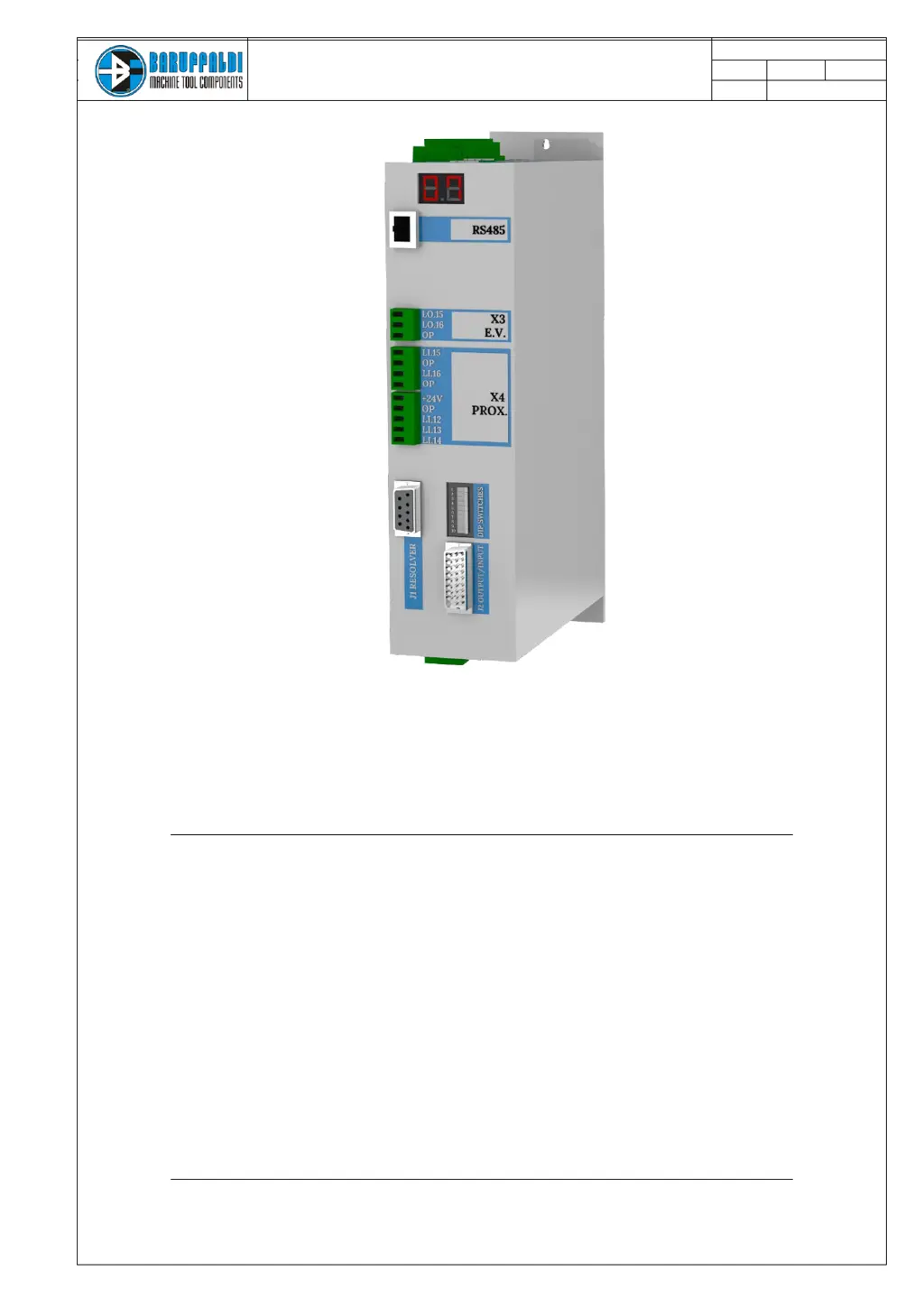
What to do if Baruffaldi Servo Drives show Unlock proximity switch in short circuit [Li.12, Li.13=On]?
- PPamela FrancoSep 9, 2025
If the unlock proximity switch remains On (Li.12) during the locking sequence on Baruffaldi Servo Drives, creating a short circuit [Li.12, Li.13=On], check the functionality of unlock proximity switch.
