Error detection and troubleshooting
Compact manual b maXX
®
BM4400, BM4600, BM4700
Document no.: 5.06014.02
75
of 94
8
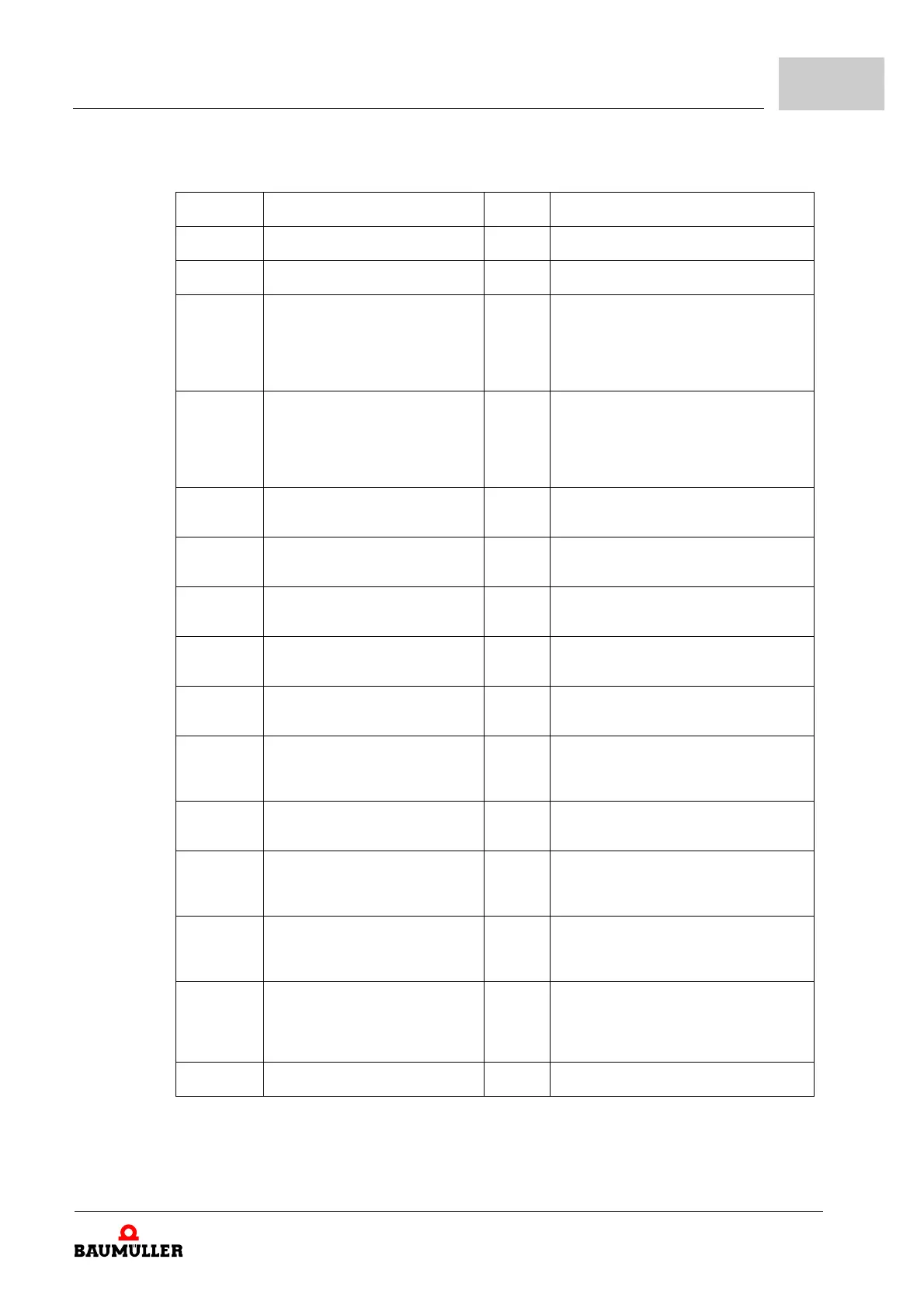
Error position controller P0213
Error no. Meaning Reaction Troubleshooting
192 Position deviation dynamic adjustable Remove the dynamical position deviation error
193 Position deviation static adjustable Remove the statical position deviation error
194 Encoder 1 is used for position control,
but is inactive.
This error is also shown, if the faulty
positioning is in one of the inactive data
records.
IS Activate encoder 1
195 Encoder 2 is used for position control,
but is inactive.
This error is also shown, if the faulty
positioning is in one of the inactive data
records.
IS Activate encoder 2
196 Software limit switch 1 exceeded adjustable Check the target position with the by the limit
switch enabled travelling range
197 Software limit switch 2 exceeded adjustable Check the target position with the by the limit
switch enabled travelling range
198 Hardware limit switch 1 exceeded adjustable Check the target position with the by the limit
switch enabled travelling range
199 Hardware limit switch 2 exceeded adjustable Check the target position with the by the limit
switch enabled travelling range
200 Homing necessary and not yet exe-
cuted
adjustable Execute homing
201 Setpoint in mode
Set-of-setpoints didn’t arrive in time
adjustable Assure, that positioning data and handshake
take place in time
(also see parameter manual)
202 Target position v Modulo position Adjustable Minimize target position or
adjust Modulo position P1239
203 Spindle positioning:
Error while initialization of the trigger
Adjustable Used encoder without triggersignal (zero pulse)
or incorrect adjustment in P1425 spindle posi
-
tioning mode
204 Spindle positioning:
Timeout at trigger signal
Adjustable Check encoder for zero pulse; check encoder
connector; check zero pulse signal by means of
the toggle bit (encoder 1/2 status bit 8)
205 Error occured while executing homing Adjustable Check the function of the reference switch and
the hardware limit switch; adjust the encoder
input selection where necessary; select only
supported homing methods
206 to 207 not assigned = 0
 Loading...
Loading...


