Three-phase synchronous motors DSC1-045-100
Technical alterations reserved
3.3. Encoder
3.3.1. Resolver
Effective input power at no-load speed
Current consumption at no-load speed
Max. output voltage at no-load speed
Rotor impedance at no-load speed
Rotor impedance with short circuit
Stator impedance at no-load speed with minimum coupling
Stator impedance with short circuit and maximum coupling
Angle error in relation to (
max
+
min
)/2
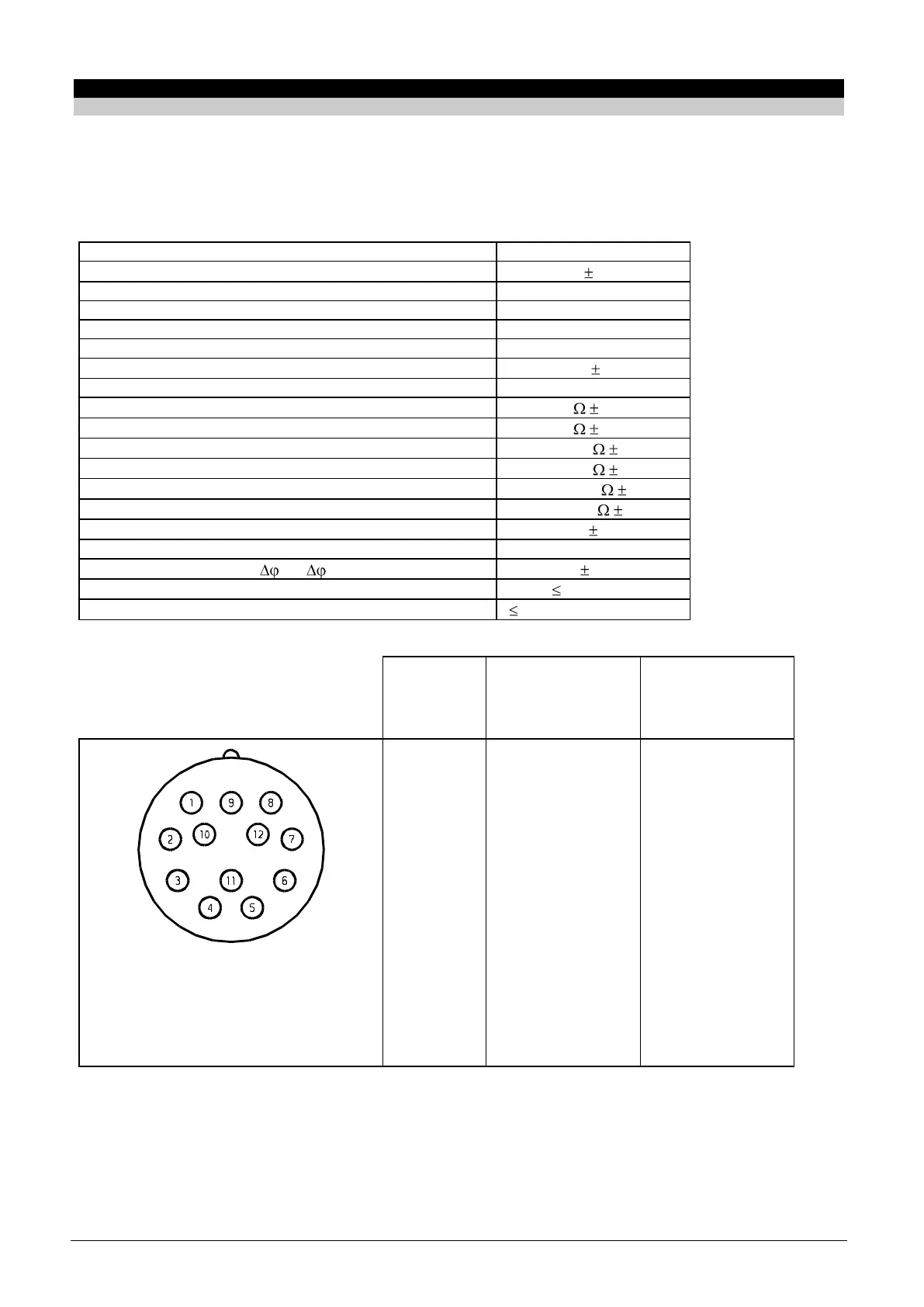
Option for allocation
PT1000 (R1/R2) or
KTY (K+/K-)on
encoder socket
1
2
3
4
5
6
7
8
9
10
11
12
cos –
-
-
-
sin -
sin +
-
cos +
-
ref +
-
ref -
cos –
-
-
-
sin -
sin +
K - or R2
cos +
K + or R1
ref +
-
ref -
View on the contact side of the receptacle
NOTE:
Use only at low demands on the true running characteristics of the motor.
The specifications are information by the encoder manufacturer.
 Loading...
Loading...
