ECON-4, SW version 1.4 rev.1, ©ComAp – March 2016 Draft 21
ECON-4 Reference guide.pdf
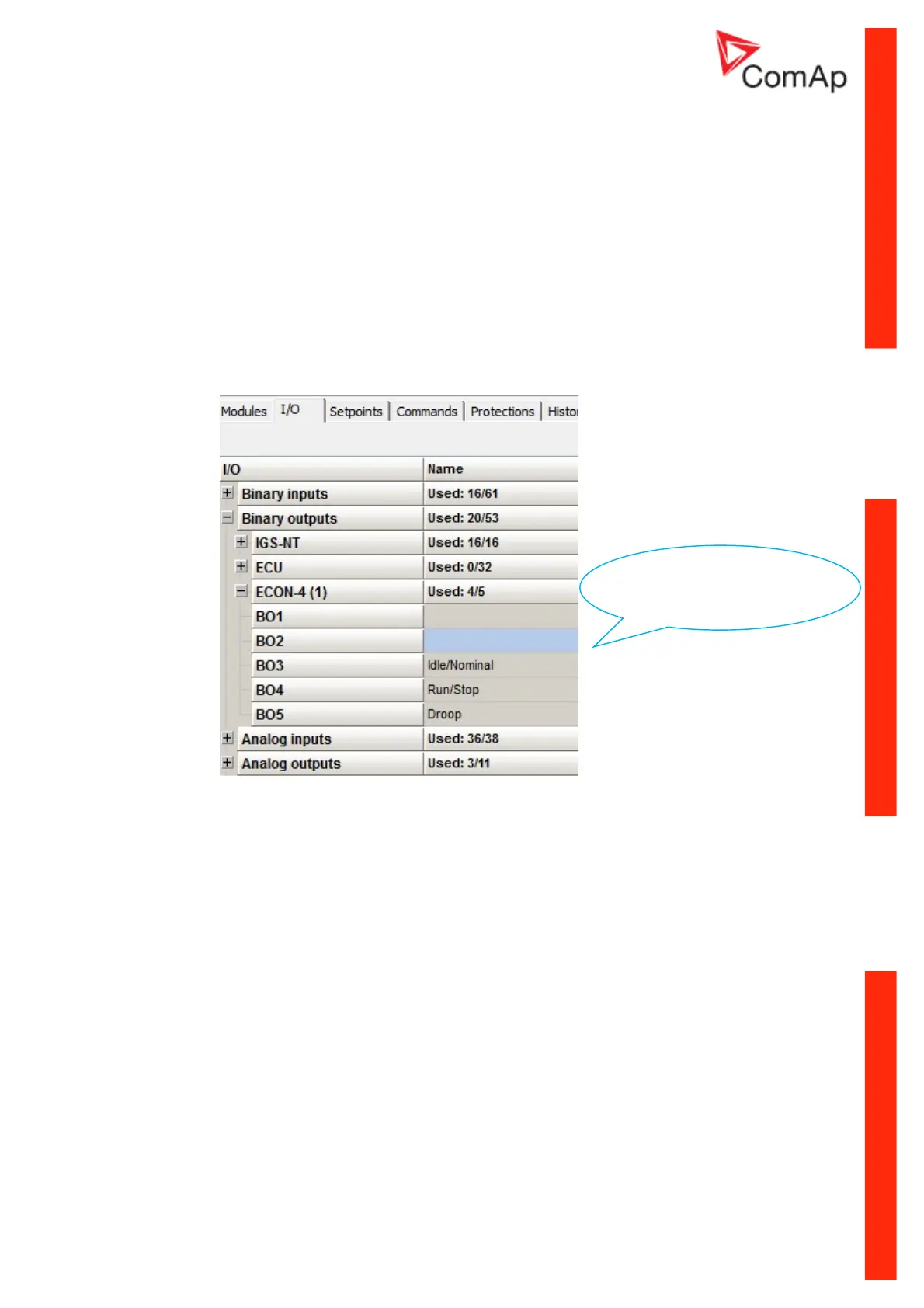
b. Configuration of Binary outputs of IGS-NT
All the ECON-4 inputs are in fact IGS-NT outputs (IGS-NT controller sends the signals
to ECON-4 unit).
BO1 – this configuration of feedback is independent and is described in previous
chapter Breaker`s feedback handling (CB request modes)
BO2 – this configuration of feedback is independent and is described in previous
chapter Breaker`s feedback handling (CB request modes)
BO3 – Idle/Nominal – configure on this output signal which defines switching from Idle
operation to Nominal ROM run. The Log bout signal: Idle/Nominal of IGS-NT can be
used. In case the Idle period is required to be skipped, configure on this output signal
Log bout: Logical 1.
BO4 – Run Stop – together with binary input S4.6 RUN/STOP this signal must be
activated to unblock ECON-4 function. Signal Log Bout: Fuel solenoid can be used.
BO5 – Droop – use the Droop function in case of in Mains parallel operation to make
the load control function more stable (protects against power swing). Use signal e.g.
GCB feedback.
c. Configuration of Analogue inputs from IGS-NTto ECON-4 (those are signals from
ECON4 to controller, in our configuration it is named from controllers point of view, so
inputs)
AIN1 – Engine RPM
The engine RPM can be sent from ECON-4 into the IS-NT via CAN line as well.
Configure the AIN1 in the following way:
Function – RPM pick-up
Sensor – Electronic
BO1 and 2 setting is
separated and described
 Loading...
Loading...











