Parameter
structure
Keypad and
display
Parameter x.00
Parameter
description format
Advanced parameter
descriptions
Serial comms
protocol
Electronic
nameplate
Performance
Menu 3
Digitax ST Advanced User Guide 57
Issue Number: 1 www.controltechniques.com
5, Fr.Servo: Incremental encoder with forward, reverse and commutation outputs, with or without marker pulse
The UVW commutation signals are used to define the motor position during the first 120° electrical rotation after the drive is powered-up or the
encoder is initialised. If the Drive encoder lines per rev (Pr 3.34) is set to zero the incremental signals are ignored and the drive can run with
commutation signals alone. A phase locked loop is used to smooth the feedback, but particularly at low speeds the motor movement includes a
significant ripple. Low speed loop gains should be used and the drive encoder filter (Pr 3.42) should be set to 16ms.
6, SC: SinCos: Encoder with no serial communications
A phasing test must be performed after every drive power-up or encoder trip.
7, SC.Hiper: Absolute SinCos encoder using Stegmann 485 comms protocol (HiperFace).
This type of encoder gives absolute position and can be used for motor control. The drive can check the position from the sine and cosine
waveforms against the internal encoder position using serial communications and if an error occurs the drive initiates a trip. An applications or
fieldbus Solutions Module can communicate with the encoder via parameters that are not visible from the keypad or drive 485 comms.
8, EnDAt: Absolute EnDat only encoder
This type of encoder gives absolute position and can be used for motor control. Additional communications with the encoder from an applications
or fieldbus module is not possible
9, SC.Endat: Absolute SinCos encoder using EnDat comms protocol
This type of encoder gives absolute position and can be used for motor control. The drive can check the position from the sine and cosine
waveforms against the internal encoder position using serial communications and if an error occurs the drive initiates a trip. An applications or
fieldbus Solutions Module can communicate with the encoder via parameters that are not visible from the keypad or drive 485 comms
10, SSI: Absolute SSI only encoder
This type of encoder gives absolute position and can be used for motor control. Additional communications with the encoder from an applications
or fieldbus module is not possible. SSI encoders use either gray code or binary format which can be selected with Pr 3.41.
11, SC.SSI: SinCos encoder using SSI comms protocol
This type of encoder gives absolute position and can be used for motor control. The drive can check the position from the sine and cosine
waveforms against the internal encoder position using serial communications and if an error occurs the drive initiates a trip.
All SINCOS encoders and encoders using communications must be initialized before their position data can be used. The encoder is automatically
initialized at power-up, after trips EnC1 to EnC8 or Enc11 to Enc17 are reset, and when the initialisation (Pr 3.47) is set to 1. If the encoder is not
initialized or the initialisation is invalid the drive initiates trip EnC7.
Ab, Fd, Fr, Ab Servo, Fd Servo, Fr Servo - Drive encoder termination select
The terminations may be enabled/disabled by this parameter as follows:
SC - Drive encoder termination select
The terminations may be enabled/disabled by this parameter as follows:
SC.Hiper, SC.EnDat, SC.SSI - Rotary encoder select
If Pr 3.39 is set to 1 or 2 the encoder is a rotary encoder and the following apply:
1. Pr 3.33 defines the number of turns bits in the comms message from the encoder and a mask is applied to Pr 3.28 to remove turns bits in excess
of those provided in the encoder comms position.
2. The number of encoder lines per revolution defined by Pr 3.34 is forced to a power of two between 2 and 32768.
3. Pr 3.35 defines the number of comms bits used to define a single turn.
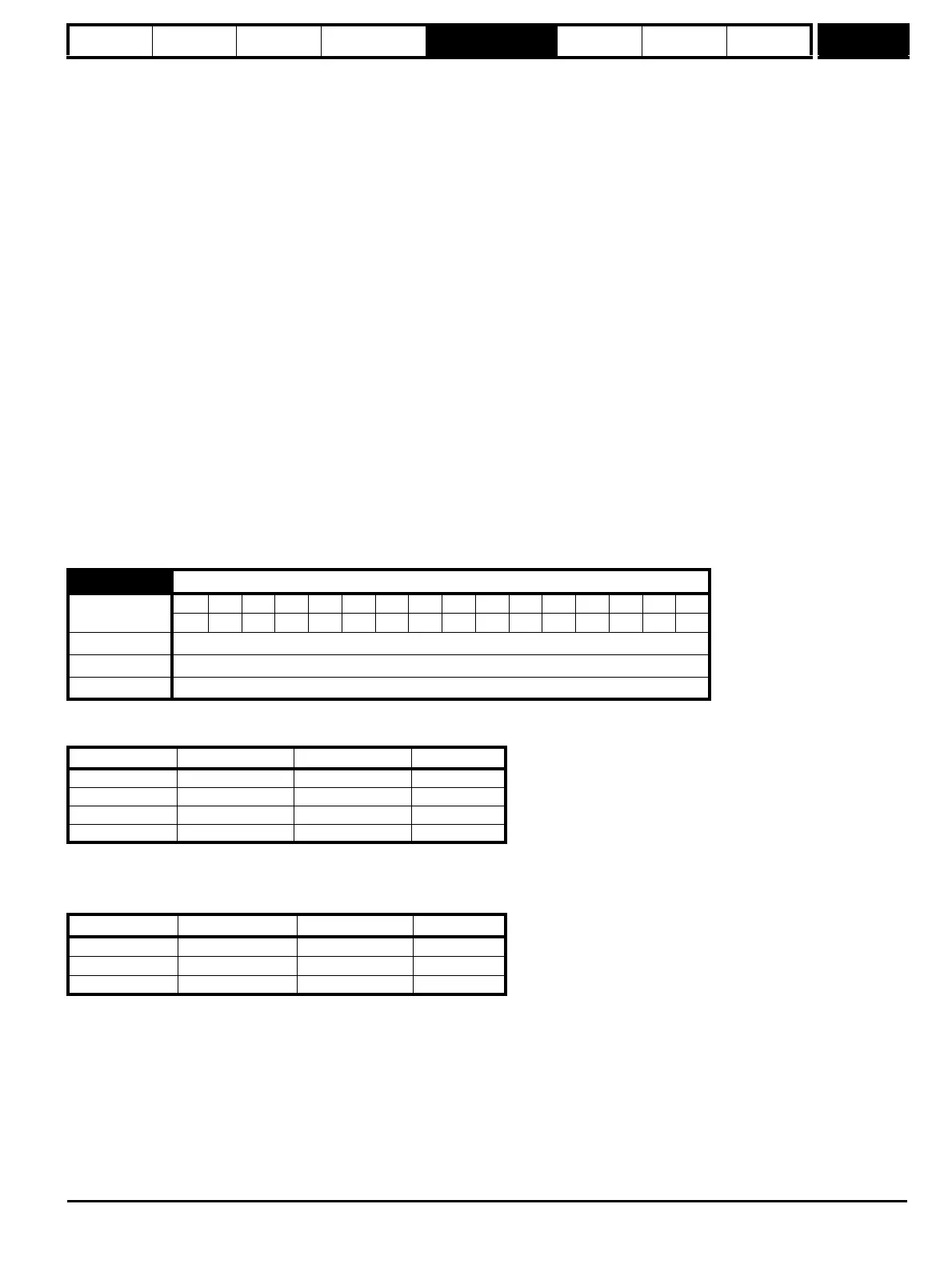
3.39
Drive encoder termination select / Rotary encoder select / Comms only encoder mode
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
11
Range 0 to 2
Default 1
Update rate Background read
Encoder input Pr 3.39=0 Pr 3.39=1 Pr 3.39=2
A-A\ Disabled Enabled Enabled
B-B\ Disabled Enabled Enabled
Z-Z\ Disabled Disabled Enabled
U-U\, V-V\, W-W\ Enabled Enabled Enabled
Encoder input Pr 3.39=0 Pr 3.39=1 Pr 3.39=2
A-A\ Disabled Enabled Enabled
B-B\ Disabled Enabled Enabled
Z-Z\ Disabled Disabled Enabled