Menu 4
Parameter
structure
Keypad and
display
Parameter x.00
Parameter
description format
Advanced parameter
descriptions
Serial comms
protocol
Electronic
nameplate
Performance
68 Digitax ST Advanced User Guide
www.controltechniques.com Issue Number: 1
5.6 Menu 4: Torque and current control
The scaling of the current feedback is based on the rating of the drive as follows:
Current scaling (Kc) is 1 per unit current and is related to the scaling of the drive current feedback. Kc is greater than the Maximum current rating
defined by Pr 11.32. The Maximum current rating is the maximum value of rated motor current (defined by Pr 5.07 or Pr 21.07) that can be set. The
limit up to which the drive can control current normally is the Maximum standard operating current or 1.75 x Kc. The current range above this is
allowed for current controller overshoot and for additional current feedback pulses associated with long cable operation.
The Maximum standard operating current is 1.75 x Kc which allows for an overload based on the Maximum current rating of 300%.
The table below gives the current scaling (Kc) and Maximum current rating for all drive sizes and voltage ratings.
Table 5-3 Current ratings
The drive operates in the rotor flux reference frame. The maximum normal operating current is controlled by the current limits.
DRIVE_CURRENT_MAX is full scale current feedback, i.e. Kc / 0.45.
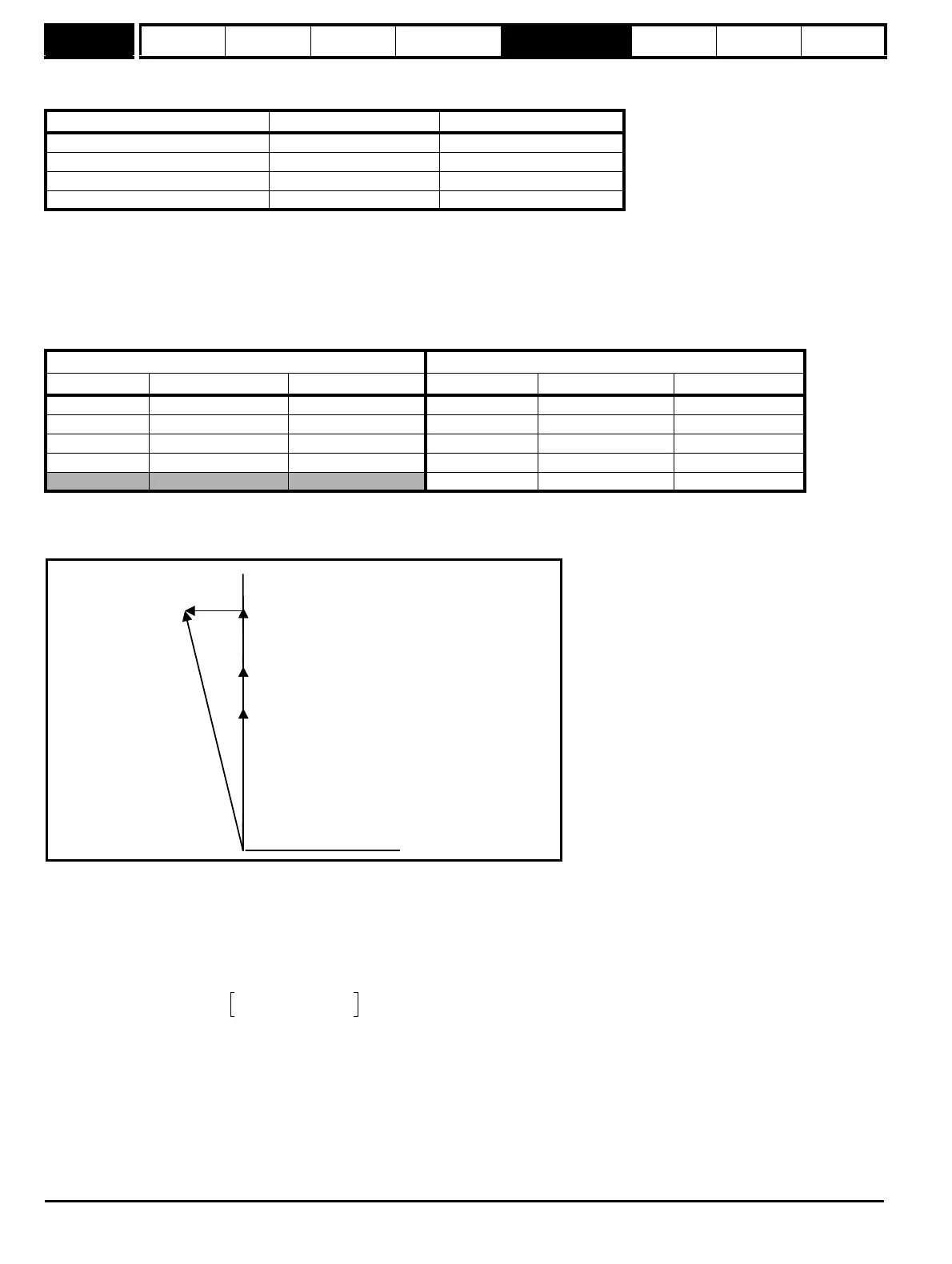
The relationship between the voltage and current is shown in the following vector diagram.
Definitions:
v
s
= motor terminal voltage vector
i
s
= motor current vector
V
ϕ = voltage produced by the rotor magnets
MOTOR1_CURRENT_LIMIT_MAX is used as the maximum for some parameters such as the user current limits. The current maximum current limit
is defined as follows (with a maximum of 1000%):
Where:
Motor rated current is given by Pr 5.07
(MOTOR2_CURRENT_LIMIT_MAX is calculated from the motor map 2 parameters)
The Maximum current is (1.75 x Kc)
The rated active and rated magnetising currents are calculated from motor rated current (Pr 5.07) as:
rated active current = motor rated current
rated magnetising current = 0
Level x Current scaling (Kc) x Maximum current rating
Over-current trip 1/0.45 = 2.22 3.81
Maximum standard operating current 1.75 3.00
Current scaling (Kc) 1.0 1.72
Maximum current rating 0.581 1.0
200V 400V
Model Current scaling (Kc) Max current rating Model Current scaling (Kc) Max current rating
DST1201 2.92 1.70 DST1401 2.58 1.50
DST1202 6.52 3.80 DST1402 4.63 2.70
DST1203 9.26 5.40 DST1403 6.86 4.00
DST1204 13.03 7.60 DST1404 10.12 5.90
DST1405 13.72 8.00
R
s
i
sy
w
mr
σ
L
s
i
sy
v
s
Rotor flux
i
s
v
ϕ
CURRENT_LIMIT_MAX
Maximum current
Motor rated current
-------------------------------------------------------
100%×=