Menu 4
Parameter
structure
Keypad and
display
Parameter x.00
Parameter
description format
Advanced parameter
descriptions
Serial comms
protocol
Electronic
nameplate
Performance
76 Digitax ST Advanced User Guide
www.controltechniques.com Issue Number: 1
When the estimated temperature reaches 100% the drive takes some action depending on the setting of Pr 4.16. If Pr 4.16 is 0, the drive trips when
the threshold is reached. If Pr 4.16 is 1, the current limit is reduced to (K - 0.05) x 100% when the temperature is 100%. The current limit is set back
to the user defined level when the temperature falls below 95%. The current magnitude and the active current controlled by the current limits should
be similar, and so this system should ensure that the motor operates just below its thermal limit.
The time for some action to be taken by the drive from cold with constant motor current is given by:
T
trip
= -(Pr 4.15) x ln(1 - (K x Pr 5.07 / Pr 4.01)
2
)
Alternatively the thermal time constant can be calculated from the trip time with a given current from:
Pr 4.15 = -T
trip
/ ln(1 - (K / Overload)
2
)
For example, if the drive should trip after supplying 150% overload for 60 seconds with K = 1.05 then
Pr 4.15 = -60 / ln(1 - (1.05 / 1.50)
2
) = 89
The thermal model temperature accumulator is reset to zero at power-up and accumulates the temperature of the motor while the drive remains
powered-up. Each time Pr 11.45 is changed to select a new motor, or the rated current defined by Pr 5.07 or Pr 21.07 (depending on the motor
selected) is altered, the accumulator is reset to zero. If Pr 4.15 is set to zero the motor thermal protection system is disabled and the accumulator
remains at zero.
The drive reactive current is shown in this parameter. This parameter is normally 0 unless operating in the field weakening range.
The current limit applied at any time depends on whether the drive is motoring or regenerating and also on the level of the symmetrical current limit.
Pr 4.18 gives the limit level that applies at any instant.
4.17 Reactive current
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
112111
Range ±DRIVE_CURRENT_MAX A
Update rate 4ms write
4.18 Overriding current limit
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
111 1 1 1
Range 0 to TORQUE_PROD_CURRENT_MAX %
Update rate Background write
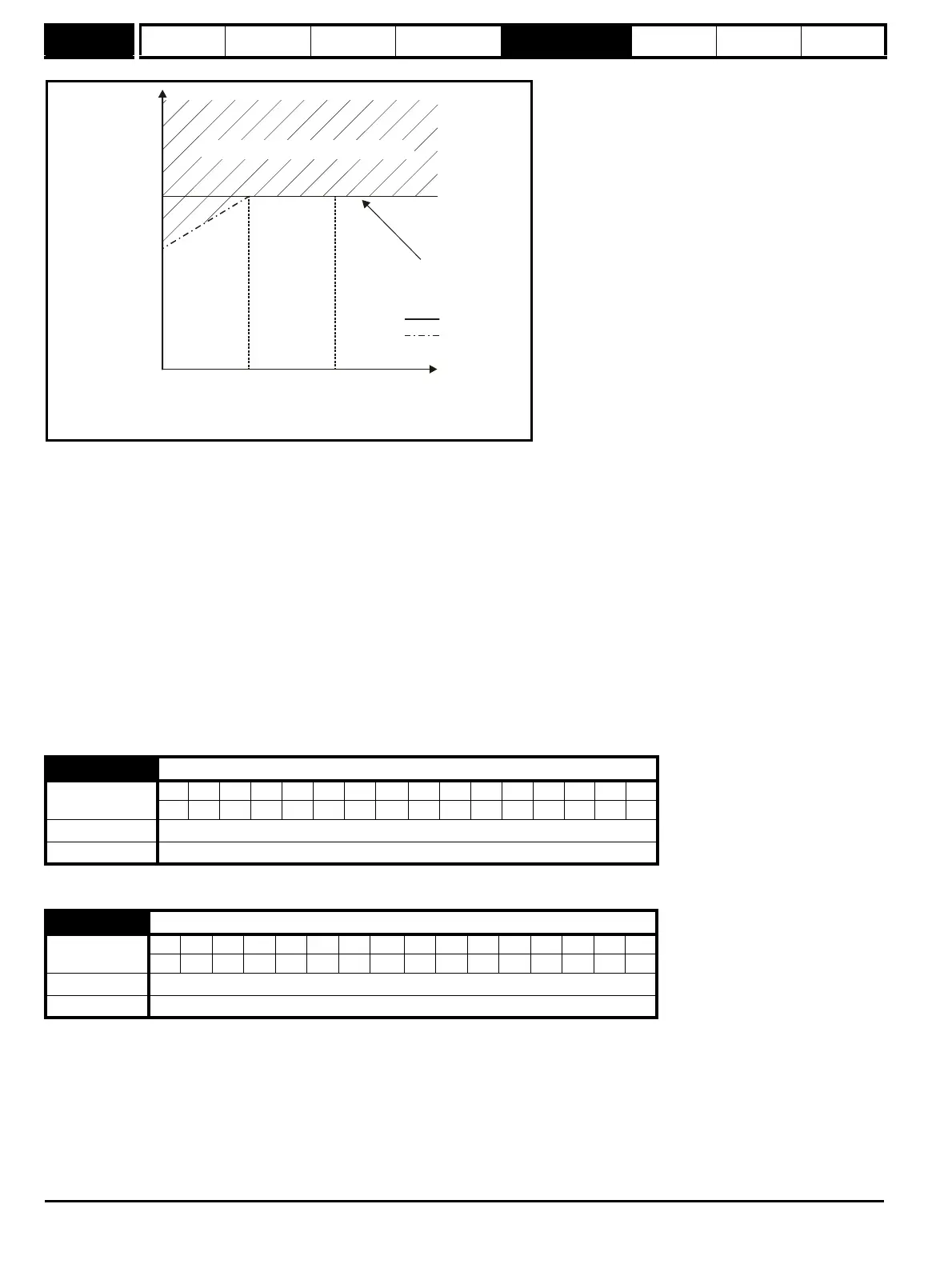
Motor total
current (Pr 4.01)
as a percentage
of motor rated
current
Motor speed as a
percentage of base speed
105%
Max. permissible
continuous
current
100%
70%
50%
Pr = 0
4.25
Pr = 1
4.25
t protection operates in this region
2
I
Proportion of rated speed Pr 5.08.