8 A255 Robot Arm User Guide
99-04-23
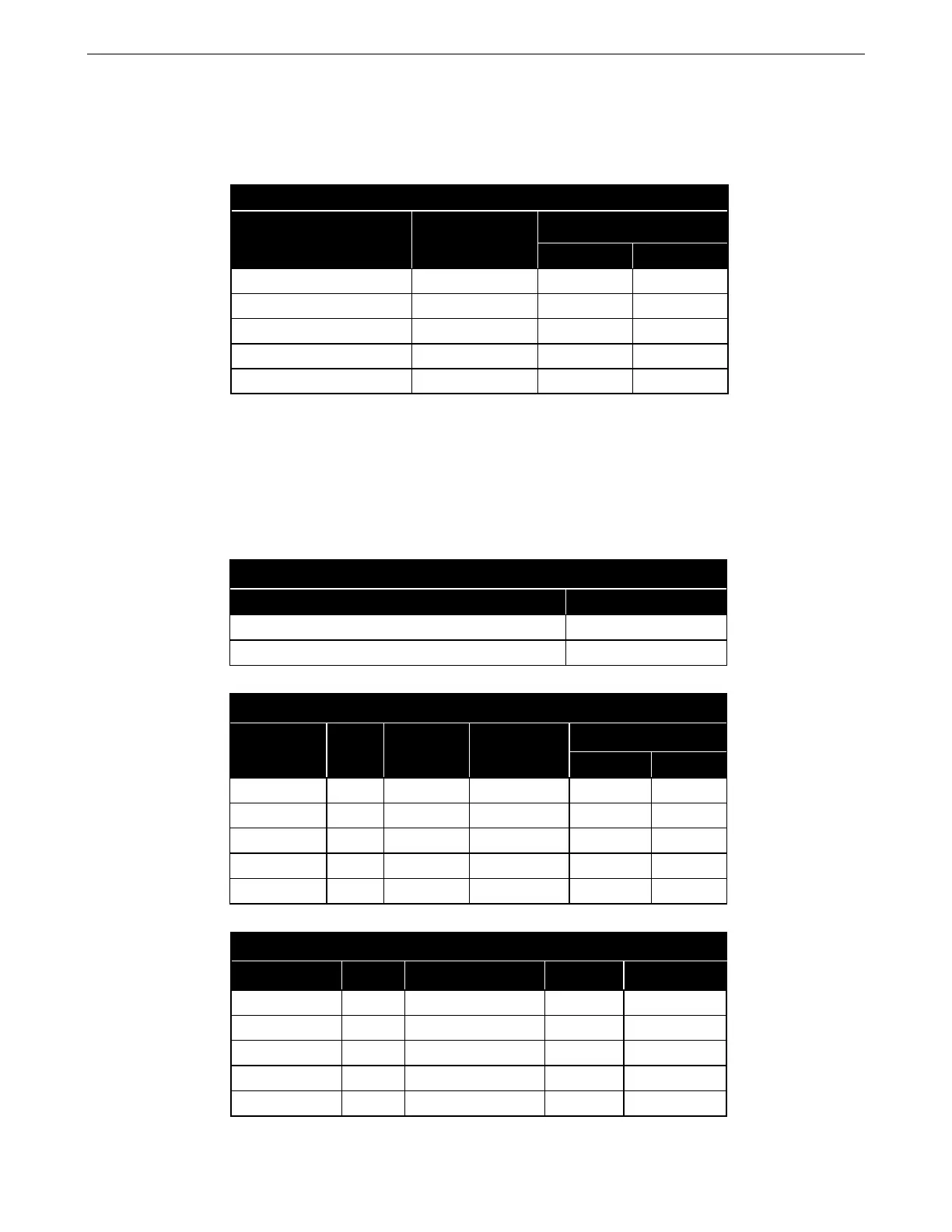
Torque Ratings
This table shows the torque rating for each arm joint.
Continuous Torque Rating
Joint Axis Torque
in-lb N-m
Waist 1 57.0 6.4
Shoulder 2 57.0 6.4
Elbow 3 57.0 6.4
Wrist pitch 4 13.0 1.4
Tool roll 5 6.3 0.71
Joint Speeds and Acceleration Rates
The standard pick and place cycle is 1.8 seconds.
The following tables show the speed and acceleration rates for each arm joint.
Maximum speeds
Motion m/s
Compounded joint interpolated motions 3.210
Linear and path motions 0.508
Joint Speeds at 100% Program Speed
Joint Axis pulse/ms Gear Maximum Speed
Reduction
rad/s deg/s
Waist 1 42 72:1 3.67 210
Shoulder 2 42 72:1 3.67 210
Elbow 3 42 72:1 3.67 210
Wrist pitch 4 30 16:1 11.8 675
Tool roll 5 30 8:1 23.6 1350
Default Acceleration Rates
Joint Axis pulse/s² rad/s² deg/s²
Waist 1 1000 8.7 498
Shoulder 2 1000 8.7 498
Elbow 3 1000 8.7 498
Wrist pitch 4 1000 39.3 2240
Tool roll 5 1000 78.5 4490