18 A255 Robot Arm User Guide
99-04-23
Presence Sensors
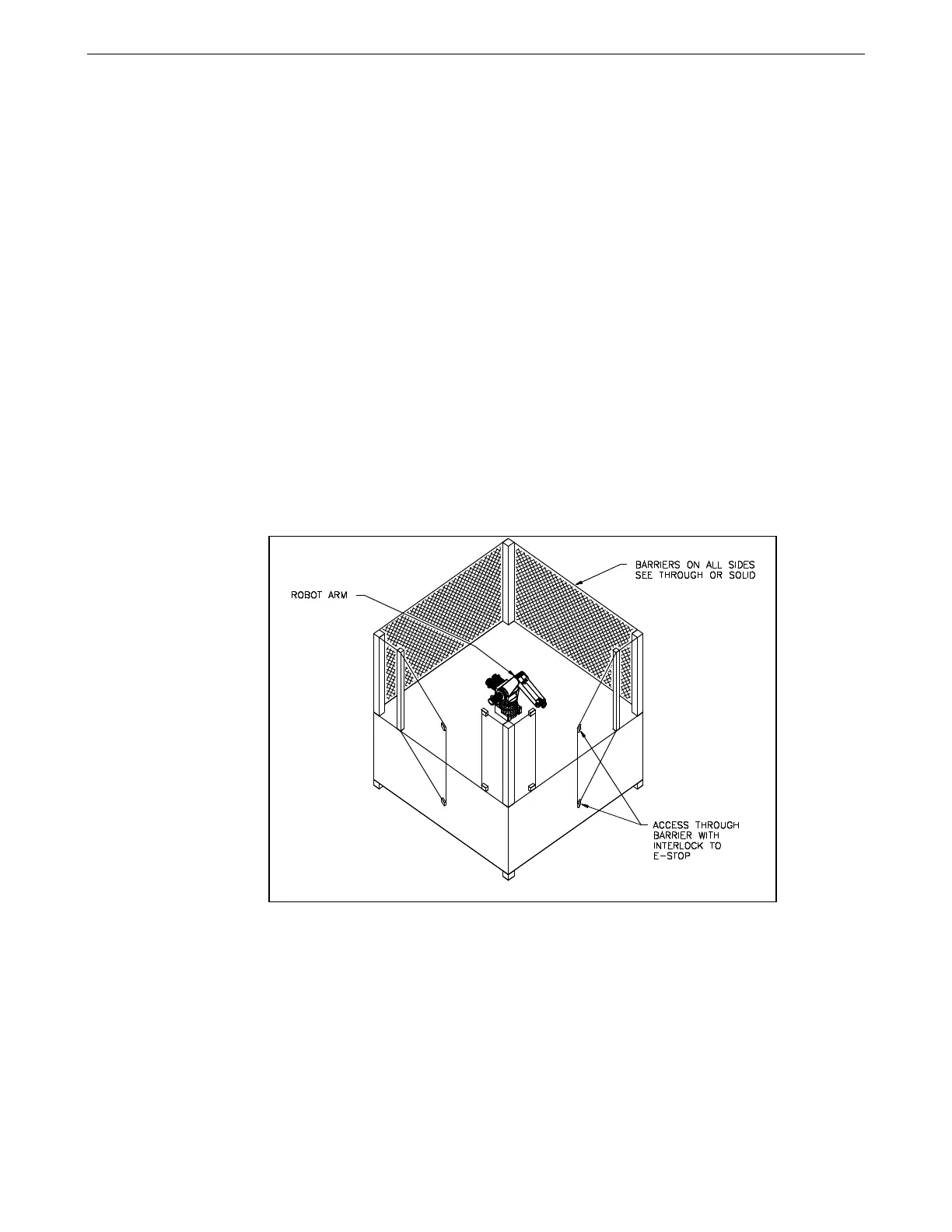
Install a presence-sensing safety interlock at any point of access through a barrier
into the arm workspace. Design the interlock as part of the robot’s e-stop circuit.
For example, a door-mounted contact switch connected to the e-stop circuit stops
the arm when the door is opened and the contact broken, and it permits arm
operation when the door is closed and contact is restored.
If connecting a device to the e-stop circuit, see “Installing a Custom E-Stop Circuit”
in the C500C Controller User Guide for connector pin identification and DIP switch
positioning.
Presence-sensing devices include:
• Interlocks on doors.
• Light curtains.
• Pressure-sensitive floor mats, etc.
Design and construct any presence-sensing device so that:
• When any component fails, the e-stop circuit is interrupted.
The presence-sensing envelope is far enough from the robot arm to stop robot arm
motion before the intruder can reach the arm workspace.
Example of barriers and doors with interlocks.