1
99-04-23
CHAPTER 1
Introduction
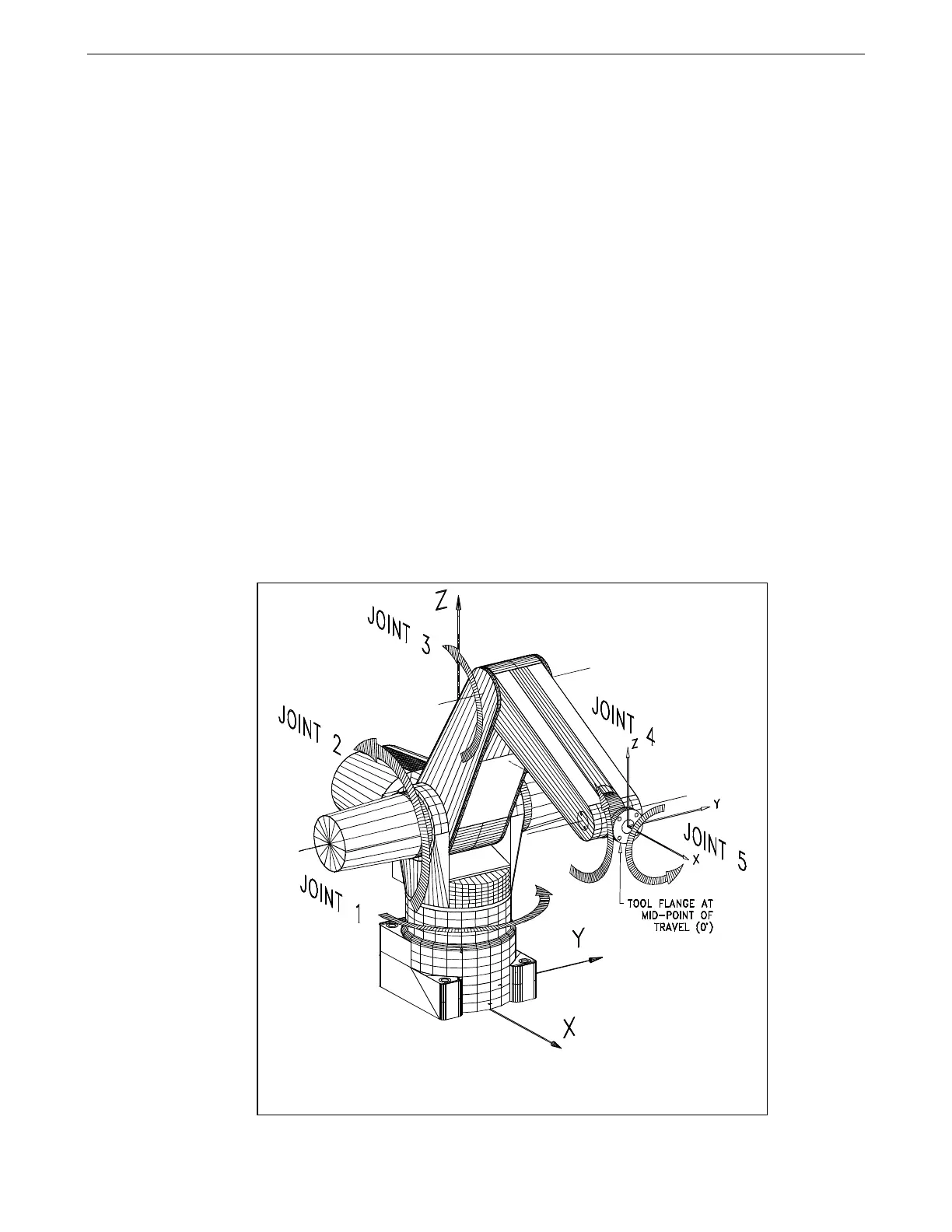
The A255 arm is articulated with five joints or axes, providing it with five degrees
of freedom. This allows the arm to move a gripper or other tool to cartesian spatial
coordinates and orientation defined by X, Y, Z, Z-rotation, Y-rotation, and X-
rotation.
The A255 robot system consists of an A255 arm and a C500C controller. The
controller runs the CROS-500C operating system and programs written in the
RAPL-3 programming language.
You can operate the A255 by a teach pendant, a terminal, or a RAPL-3 program.
For standard applications, you can edit programs, move the arm, teach locations,
and run programs from either the teach pendant or the terminal.
For advanced applications, you can also edit and compile programs off line on a
computer and use advanced tools through the terminal.
The A255 is designed for laboratory automation, machine loading, product testing,
parts assembling, material handling, education and research, and other tasks.
The A255 arm has five axes of motion (joints): 1 (waist), 2 (shoulder),
3 (elbow), 4 (wrist pitch), and 5 (tool roll).