6 A255 Robot Arm User Guide
99-04-23
Reach
The maximum reach of the arm is calculated horizontally outward from the
shoulder joint (axis 2) and vertically upward from the bottom of the base.
The arm can reach points below the level of the bottom of the base.
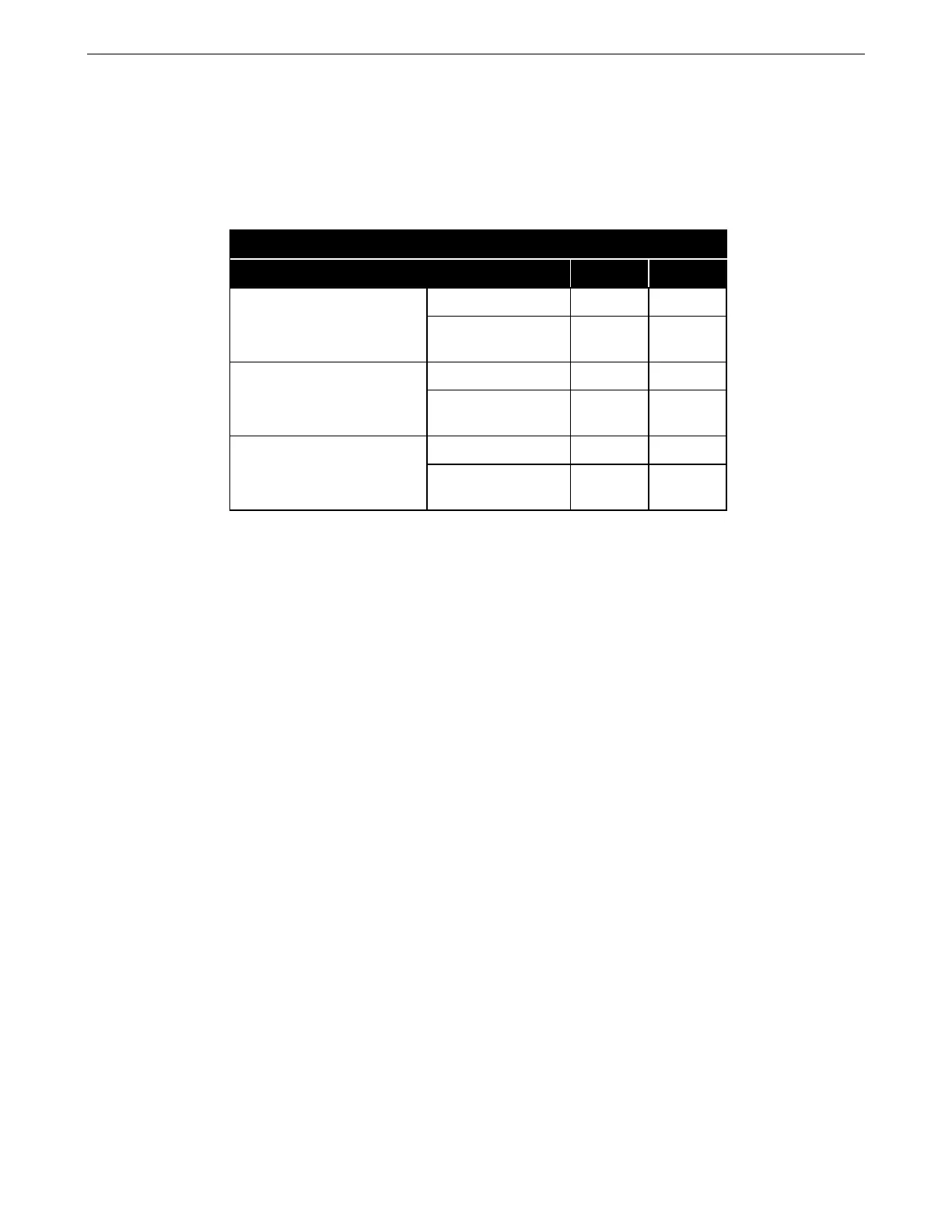
A255 Maximum Arm Reach
inch mm
Horizontal
to tool flange 22.00 558.8
outward from the shoulder
axis in the X, Y plane
to finger platform
of servo gripper
25.78 654.8
Vertical
to tool flange 32.00 812.8
upwards along the Z axis
to finger platform
of servo gripper
35.78 908.8
Vertical
to tool flange 2.00 50.8
downwards below the
base level
to finger platform
of servo gripper
5.78 146.8