Chapter 6: Basic Operation 51
99-04-23
• If the arm refuses to home correctly for three consecutive attempts, contact
your distributor or CRS Robotics.
Moving with the Teach Pendant
It is safer to use the teach pendant instead of terminal commands, since motion
stops as soon as a pendant key is released, for most pendant keys. However,
systems on CROSnt that do not have a teach pendant have to use terminal
commands.
Motion from the teach pendant uses the axis keys. Each axis has two keys, one for
motion in the positive direction, and one for motion in the negative direction. The
key’s function depends on the mode selected.
Motion Options
There are a number of modes and types of motion. Not all combinations of mode
and type are possible.
Modes
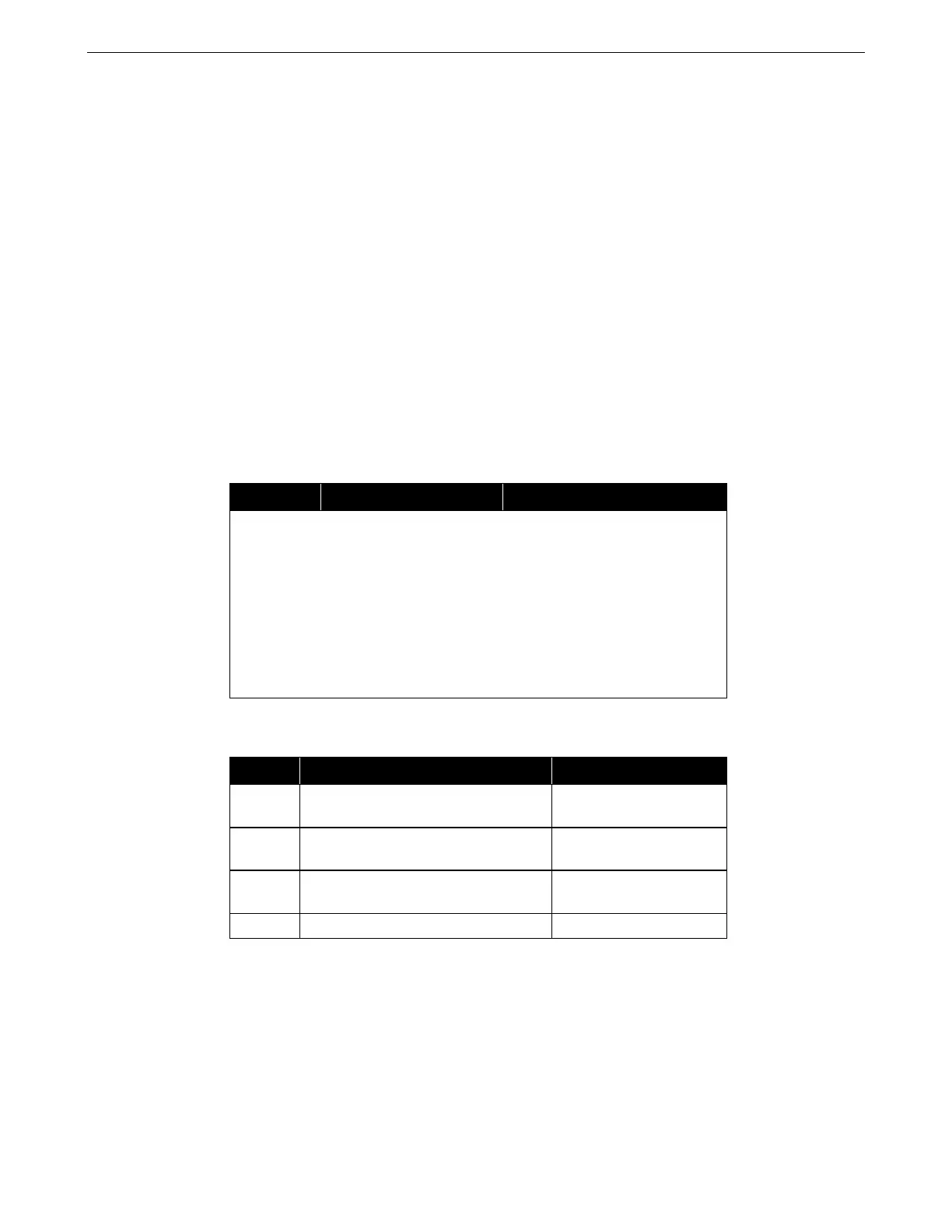
A mode corresponds to a coordinate system. F4 toggles mode options.
Mode Resulting Motion Coordinates
joint rotates around
a joint axis
Axis 1, 2, 3, 4, 5
(6, 7, 8, if track or carousels)
world moves along or around
world cartesian axes
X, Y, Z, Zrotation, Yrotation,
Xrotation
tool moves along or around
tool axes
X, Y, Z, Yaw, Pitch, Roll
cylindrical moves along or around
cylindrical axes
θ, R, Z, Zrotation,
perpendicular-to-R-and-
Zrotation, Rrotation
Types
There are four types of motion. F3 toggles type options.
Type Resulting Motion Usable with Modes
velocity continuous motion while key is
pressed
Joint, World, Tool,
Cylindrical
jog incremental motion for each
pressing
Joint, World
align aligns to an axis while key is
pressed
World
limp limps (and falls) when pressed Joint
Speed for velocity type and increment distance for jog type are set using the
SPEED UP and SPEED DOWN keys.
Limp is described in a later section.
Directions
Positive and negative directions, along or around an axis, are shown in RAPL-3’s
Application Development Guide.