28 A255 Robot Arm User Guide
99-04-23
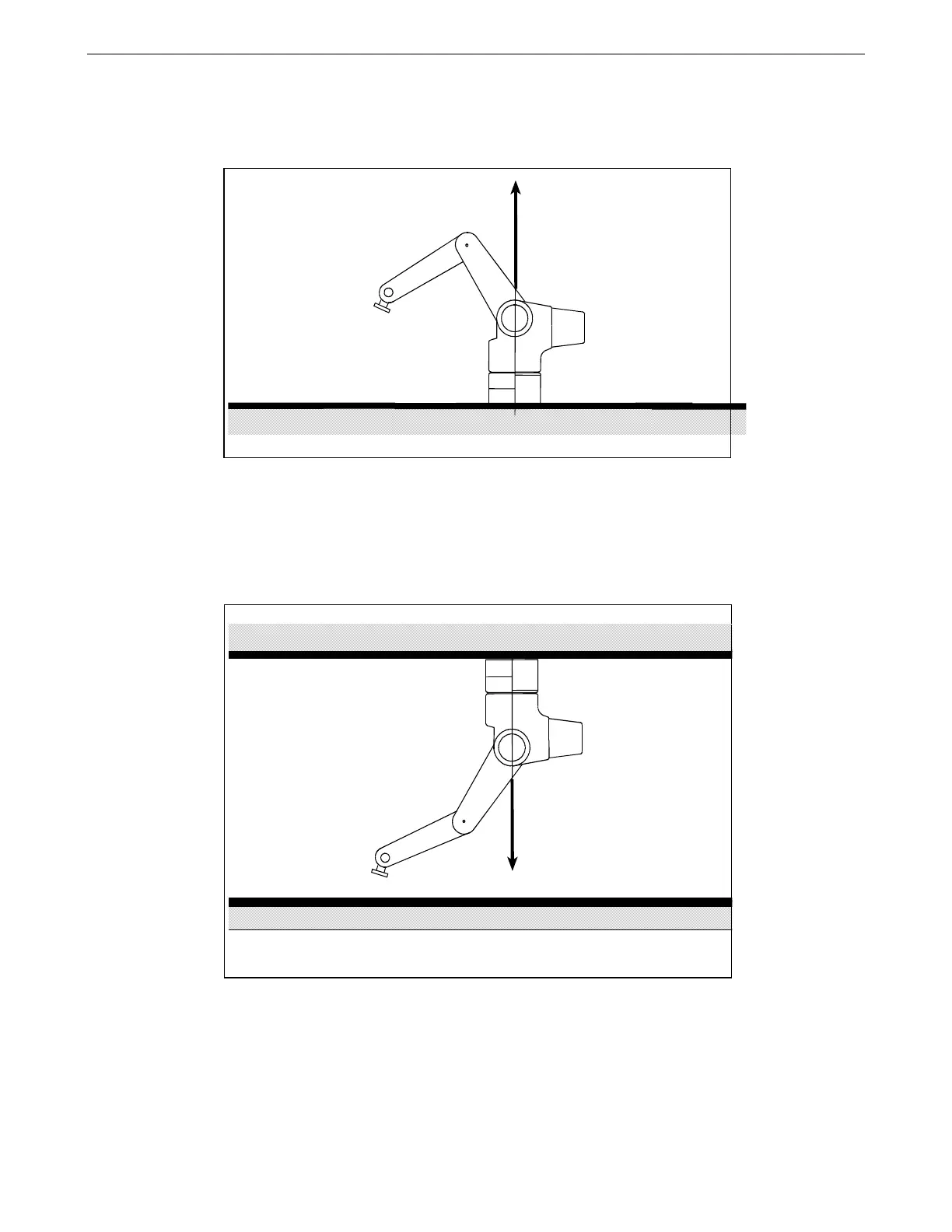
Upright Position
You can install the arm upright on a table top. A portion of the workspace is
occupied by the arm.
Inverted Position
When the arm is inverted, a greater portion of the table surface is available as
workspace, but joint 2 and 3 limits must be considered. A base offset must be
defined. See the base() command (RAPL-3). For more information, refer to the
tables and drawings on page 4 (Range of Motion) and page 6 (Reach).
Unpacking the Arm
You need:
• Utility knife
•
5
/
16
hex key
Upright on a table top.
Inverted, suspended from an overhead bracket. A base offset must be
defined.