12 A255 Robot Arm User Guide
99-04-23
Brakes
Fail-safe brakes prevent the robot from moving under the influence of gravity or
inertia when power is removed. Each brake consists of a spring-loaded clamp on a
rotating disk. A 35 Volt DC signal energizes a magnetic solenoid which unloads the
clamp.
Brakes are installed on all joints except joint 1.
Do not move the joints by hand when brakes are engaged. This may damage some
components.
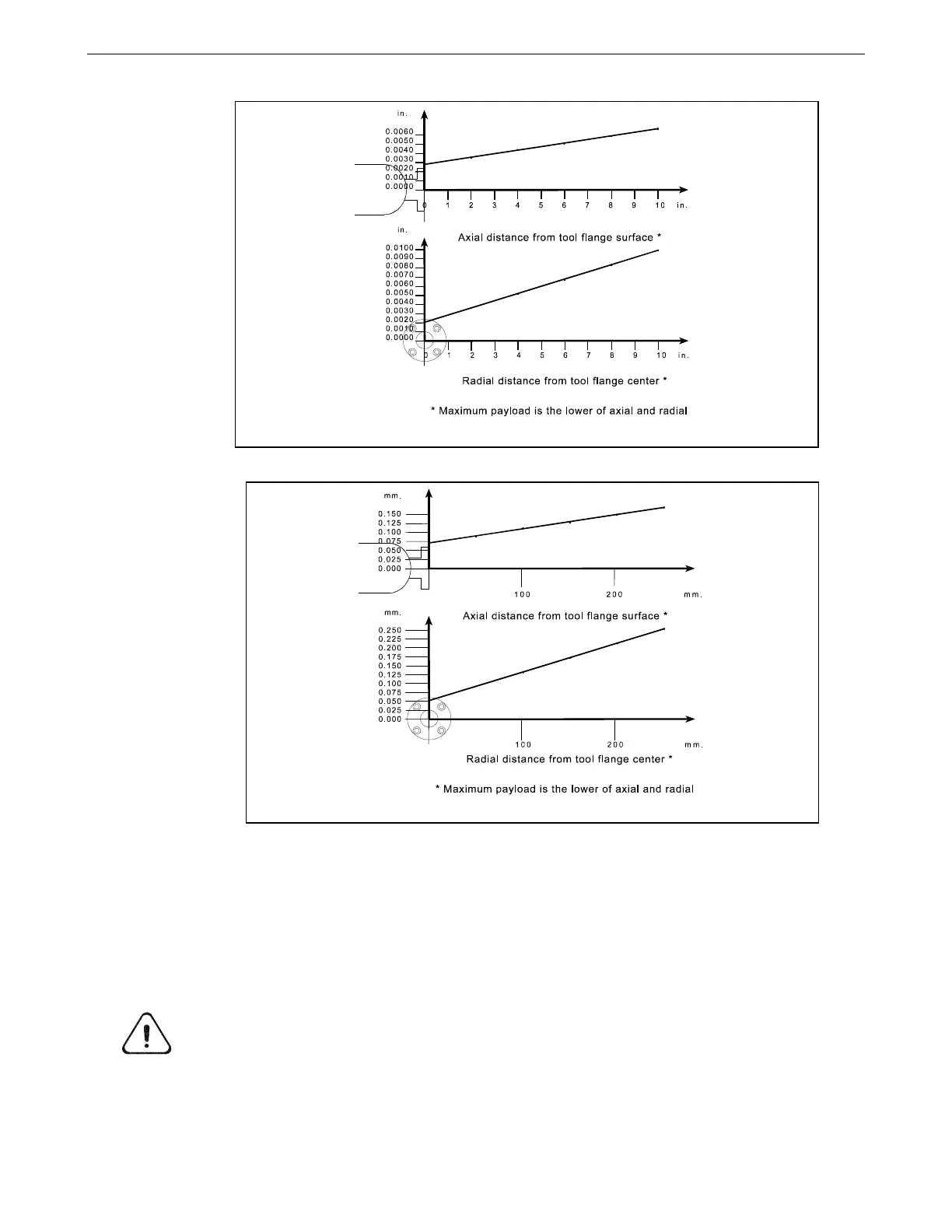
Imperial: Resolution decreases with the distance to the payload’s center of gravity
Metric: Resolution decreases with the distance to the payload's center of gravity.