38 A255 Robot Arm User Guide
99-04-23
Check the Installation of Arm and Controller
To check for proper functioning of the arm and to move the arm out of the
shipping position, the arm and controller components must be installed and ready
to operate.
Ensure that you have:
• Mounted and securely fastened the arm.
• Mounted the controller.
• Grounded the arm.
• Connected the umbilical cables and protected them from damage.
• Installed, or verified, the fuses and voltage selector in the controller.
• Verified the ground for the controller.
• Complied with the power requirements.
Check the Installation of Other Components
To check for proper functioning of the arm and to move the arm out of the
shipping position other components must be installed and operating.
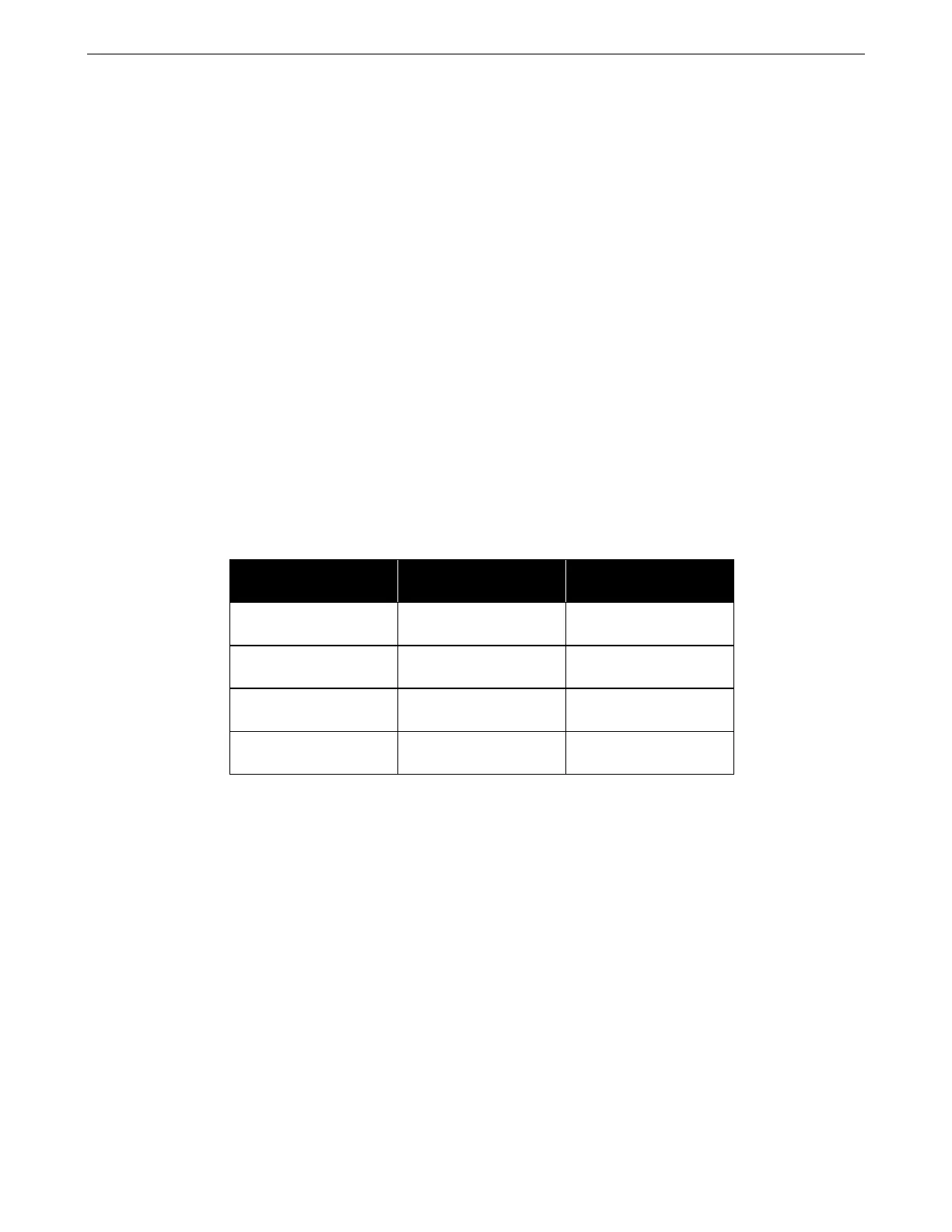
To commission, you need the following system tools.
Procedure Required or Preferred
Tool
Alternative Tool
Check Encoder
Feedback
terminal —
Check E-Stops — —
Move Out of Shipping
Position
teach pendant terminal
Check Live-man
Switch
teach pendant —
Terminal
CROS-500C
To use a terminal from a computer, ensure that you have:
• Connected a straight-through cable (not a null modem cable) from a serial i/o
port of the computer to the front panel console port of the controller.
• Installed terminal emulator software, such as, Robcomm3 on the computer;
started the software, and opened the terminal window.
• Powered up the controller.
CROSnt
Systems with CROSnt can, but do not have to, use the application shell of
CROSnt. To use the application shell of CROSnt, ensure that you have:
• Connected the SimSockD cable from a serial i/o port of the computer to the
teach pendant port of the controller.